
帕特里克.布萊克特號實驗艇
(上與下)試航階段的帕特里克.布萊克特號(XV Patrick Blackett X01)實驗船,船尾仍掛著荷蘭國旗。
帕特里克.布萊克特號的船型是荷蘭達門集團的FCS 4008海洋沿岸工作船。


一艘用於奈及利亞油田業務的達門集團FCS 4008工作艇The Mediator III號

下水前的帕特里克.布萊克特號,注意斧型艏設計,能平順地切穿海浪。艇首有一個橫向推進器。

2022年7月27日,帕特里克.布萊克特號首次抵達樸次茅茲,並於7月29日正式交付皇家海軍NavaX部門。

帕特里克.布萊克特號的駕駛台。

帕特里克.布萊克特號的主機艙。

帕特里克.布萊克特號艇尾。艇上四部柴油機各透過一個傳動齒輪箱驅動一個推進軸,
總共是四軸(固定距螺旋槳)。

船尾裝載了POD集裝箱模組的 帕特里克.布萊克特號,此模組是兩座搜索雷達。
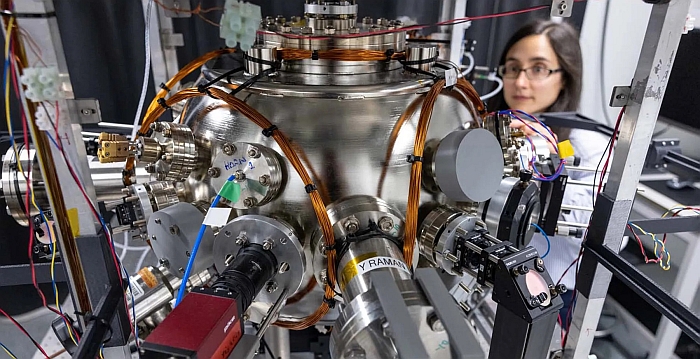
帕特里克.布萊克特號測試的量子加速計(accelerometer )原型。量子導航技術能在沒有外界更新資料
的情況下,在長時間內提供極高的導航精確度,遠優於基於陀螺儀的傳統慣性導航系統。高精確度導航
定位能力是無人自航載具實用化的關鍵技術之一。

帕特里克.布萊克特號在2023年5月停靠倫敦泰吾士河靠近塔橋(Tower Bridge)的碼頭。
此次航行中,該船測試了倫敦帝國大學研發的量子導航裝置原型。

2023年9月,帕特里克.布萊克特參與葡萄牙主導、以測試無人技術為主的北約REPMUS演習
──by captain Picard
|
為了發展無人自航、人工智能(AI)等新技術,皇家海軍發展部門(Develop Directorate)組建了名叫「NavyX」的團隊,目的是加速開發與測試最先進技術與裝備,使得創新概念能在最短時間內從構想到落實。NavyX是皇家海軍無人自航、致命性與創新發展的加速器(“Autonomy, Lethality and Innovation accelerator)。 在2021年8月,NavyX開始在市場上尋找一艘合適的船隻,作為新技術的專門海上實驗平台。在2021年12月,NavyX正式展開招標,尋求一艘已經建造但還沒有使用的新船,排水量在500噸以內,全長不超過48m,航速至少20節;船尾需有大型的工作甲板,空間至少能放置兩個標準集裝箱(TEU,20英尺)。在2022年2月,NavyX正式選定了一艘荷蘭達門集團(Damen)建造中的FCS 4008型沿海支援船(Offshore Supply Ship),並在2月簽署合約;在2022年3月,這艘FCS 4008的所有權移交皇家海軍,從4月起在達門集團位於Gorinchem造船廠進行客製化改裝工作。這艘FCS 4008再完成試航、安全認證等程序之後,在2022年7月27日首次抵達樸次茅茲,並在7月29日於樸次茅茲基地舉行交付儀式,命名為帕特里克.布萊克特號(XV Patrick Blackett X01,簡稱XV PTBK,XV是實驗用船隻的代號);有別於皇家海軍現役船艦,帕特里克.布萊克特號船體漆成消光黑,並漆上NavyX的標誌,舷號為X01。由於並非第一線作戰船艦,帕特里克.布萊克特號懸掛英國政府用船隻的藍旗(Blue Ensign)。依照英國國防部資料,購買帕特里克.布萊克特號的成本是933萬3151英鎊(1135萬325美元)。 用來命名這艘實驗船的帕特里克.布萊克特(1897-1974)是在1948年獲得諾貝爾物理學獎的英國科學家,被認為是英國20世紀最傑出科學家之一。帕特里克.布萊克特在第一次世界大戰期間服役於皇家海軍,在1914年時作為裝甲巡洋艦卡那馮號 (HMS Carnarvon)的船員參與福克蘭群島海戰 (Battle of the Falkland Islands),在1916年作為伊莉莎白級戰艦巴爾漢號(HMS Barham)的船員參與了日德蘭海戰(Battle of Jutland);在二次大戰期間,帕特里克.布萊克特在皇家航空研究院(Royal Aircraft Establishment)任職,參與發展探測納粹德國U型潛艇的技術,隨後升職為皇家海軍作戰研究主管(Director of Naval Operational Research);在1965年,帕特里克.布萊克特成為皇家學會(Royal Society)會長。 達門FCS 4008是達門集團快速人員運補船(Fast Crew Supplier)系列之一,主要用於支持沿岸海洋工程,例如安裝油管、天然氣管、風機等。FCS 4008型全長41.2m,寬8.7m,最大吃水約3m,載重噸140噸,採用鋼質船殼、鋁合金上層,最大航速30節,航速25節時續航力1200海里,甲板面積140平方公尺,編制約8名船員,最多能搭載約90~100名乘客,燃油儲存空間65立方公尺,淡水儲存空間13立方公尺,污水儲存空間1.8立方公尺。FCS 4008採用達門集團設計的斧型艏(axe-bow),能平順地切穿海浪(而不是破浪),可降低阻力;此種低浮力的斧型艏加上錐形船身,能較平順地穿過海浪,減少受到興波阻力的衝擊與縱向擺盪,能提高船上人員航海感受,並減少燃油消耗。
帕特里克.布萊克特號全長41.2m,寬8.75m,吃水3.05m,註冊排水量270噸,推進系統為四部Caterpillar C32
V12柴油主機,每部主機各由一個傳動齒輪箱直接帶動固定距推進螺旋槳(四軸),最大航速超過20節(FCS
4008設計的最大航速可達25至30節),航速20節時續航力3200海里;艇上電力由兩個99KW的發電機提供。艇首設有一部120KW的液壓橫向推進器,用於靠泊以及在狹窄水域的迴旋機動。帕特里克.布萊克特號艇上總共有9000個傳感器,能向岸上實時傳輸船艇與裝備的各種工作數據,使岸上單位能即時判斷船艇運作情況,進行分析、維修預測以及其他遠端工程協助等。
帕特里克.布萊克特號曾經測試2023年6月交付英國國防部的Saab Giraffe 1X多功能雷達,主要用於無人飛行系統(UAS)的探測與預警。
NavyX團隊的長程目標,是要在帕特里克.布萊克特上測試完全自主航行操作系統。此項研究分為兩個階段;首先,船上的感測器必須整合到符合MAPLE規範的開放計算環境,並且進一步加裝自主航行所需的各項感測器,
這些設備與整合工作必須先進行認證,並且連結到船上控制系統以及岸上的遠端遙控站。第二階段則是在遠端遙控模式下減少駕駛台人員需要的控制動作,而帕特里克.布萊克特號也需要在各種氣候與海象條件下完成日間與夜間的航行展示。
最後階段則是最具挑戰性的階段,將完整的自主航行能力相關設備整合到船上,開始驗證自主航行技術。首先,必須滿足在完全沒有人員的情況下進行自主航行,並在遭遇其他船隻時依照海上國際防碰撞規範(International Regulations for Preventing Collisions at Sea,COLREGS)動作對應,不會對其他船隻與海員造成妨害;當此階段達成後,研究的焦點就會轉向作戰任務所需的自主航行控制技術。
NavyX團隊測試MADFOX無人水面載具。
正在樸次茅茲吊裝一個PODS集裝箱模組的帕特里克.布萊克特號。
由於皇家海軍對這種全新平台不熟悉,認證工作緩慢,帕特里克.布萊克特號交艇之後7個月都沒有太多活動。直到2023年5月,帕特里克.布萊克特號才開始在海上測試倫敦帝國大學(Imperial College, London)開發的海上量子感測器原型,整合在一個PODS集裝箱模組裡;此系統能在沒有外部資料更新的情況下,在長時間提供精確度遠高於現行基於機械式陀螺儀與加速計(accelerometer)的慣性導航系統的導航數據。
此次試航期間帕特里克.布萊克特前往倫敦時,通過達特福過河道 (Dartford Crossing)的伊莉莎白二世大橋(Queen Elizabeth II Bridge)下方時,發現鐵橋會造成干擾。
隨後在2024年2月,英國國防部又在租用的赫斯特角號(MV Hurst Point)進一步測試安裝在POD集裝箱模組裡的量子導航原型設備。
|


