海麻雀點防禦防空飛彈系統
美國海軍塔拉瓦級(Tarawa class)兩棲攻擊艦拿騷號(USS Nassau LHA-4)前部的MK-25基本點防禦飛彈發射器
(BPDMS)發射一枚RIM-7海麻雀防空飛彈的畫面。注意艦橋頂上有一個導引BPDMS的MK-115射控雷達。

美國海軍中途島號(USS Midway CV-41)航空母艦的BPDMS正發射一枚RIM-7海麻雀防空飛彈。
MK-25發射器修改自ASROC反潛火箭的MK-112八聯裝發射器,所以十分龐大笨重。
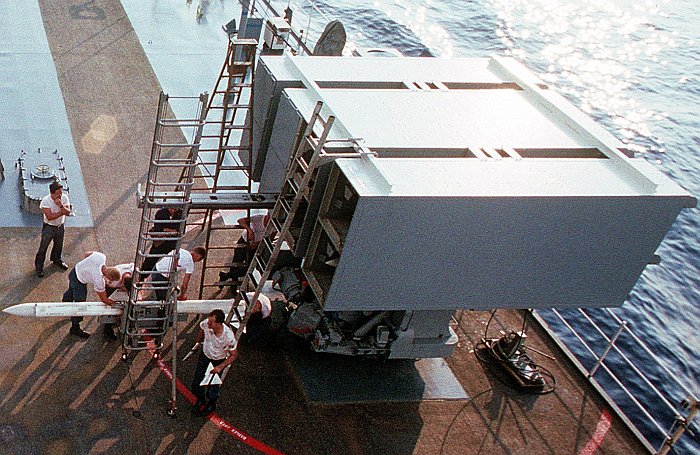
美國海軍藍嶺號(USS Blue Ridge LCC-19)指揮艦的BPDMS發射器正再裝填RIM-7海麻雀防空飛彈。
攝於1991年4月1日沙漠風暴戰役(Operations Desert Storm)期間。

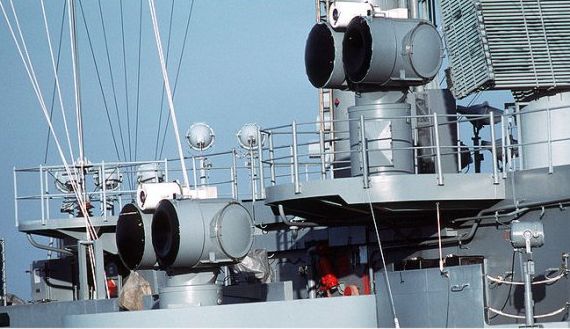
(上與下)加拿大部族級(Iroquois class)飛彈驅逐艦的MK-3伸縮式海麻雀防空飛彈的四聯裝發射架,
平時收容在彈艙內,接戰時才伸出。此一發射架能調整水平與俯仰角度。不過,MK-3發射器從彈艙中伸出、
部署需要一段時間,還需要暖機,實際效能並不如預期。
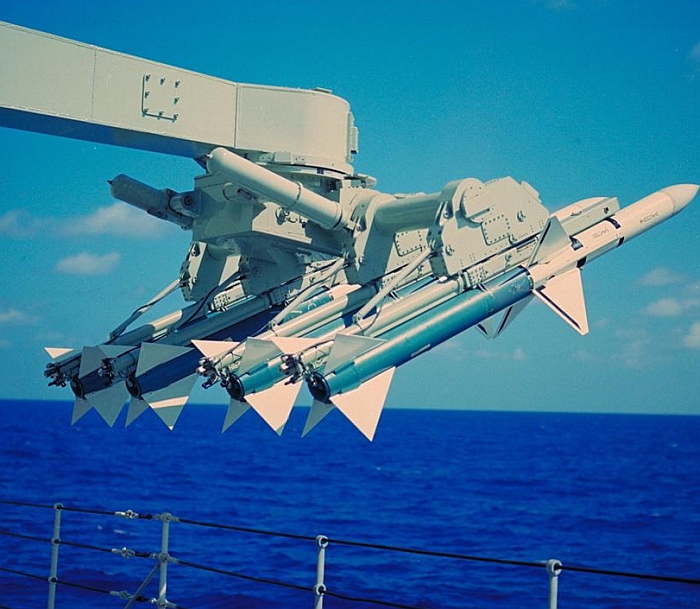
加拿大部族級(Iroquois class)飛彈驅逐艦的MK-3伸縮式海麻雀防空飛彈的彈艙內部,再裝填作業是自動化進行。

由MK-29八聯裝發射器發射的改良型海麻雀飛彈(IPDMS)
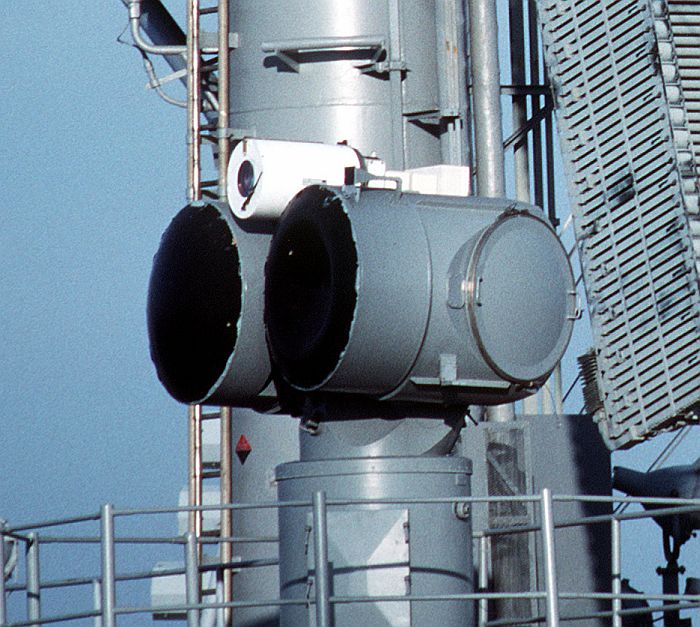
美國版IPDMS採用的MK-95射控雷達天線 ;每組雷達由兩個天線構成,其中一部是連續波發射天線,
另一部則專門接收回波。攝於尼米茲級航空母艦上。

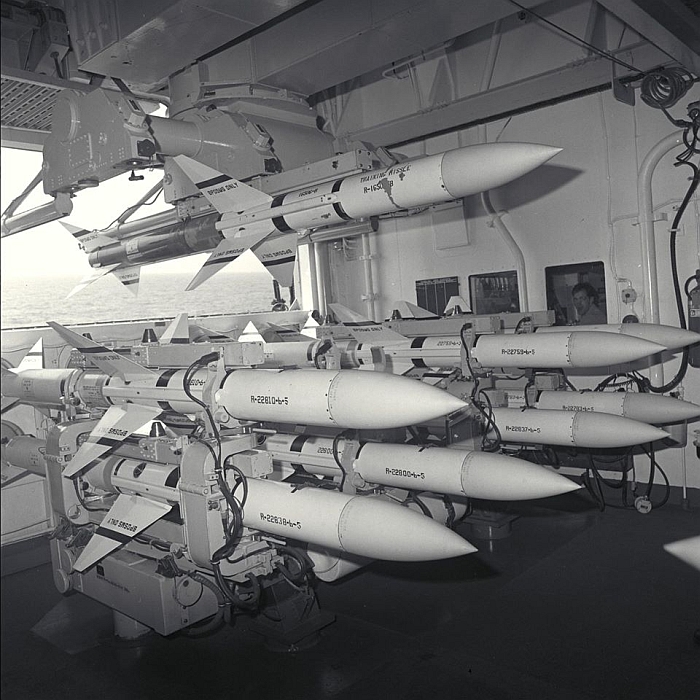
希臘海軍伊利級(Elli class,原荷蘭寇騰納爾級)巡防艦艦首的MK-29發射器正在裝填RIM-7P海麻雀防空飛彈。

美國海軍兩棲突擊艦上的MK-29八聯裝發射器。

一艘澳洲海軍紐澳軍團級(Anzac class)巡防艦發射RIM-7P海麻雀防空飛彈,
垂直發射器型號是MK-41 Mod5(戰術型)。

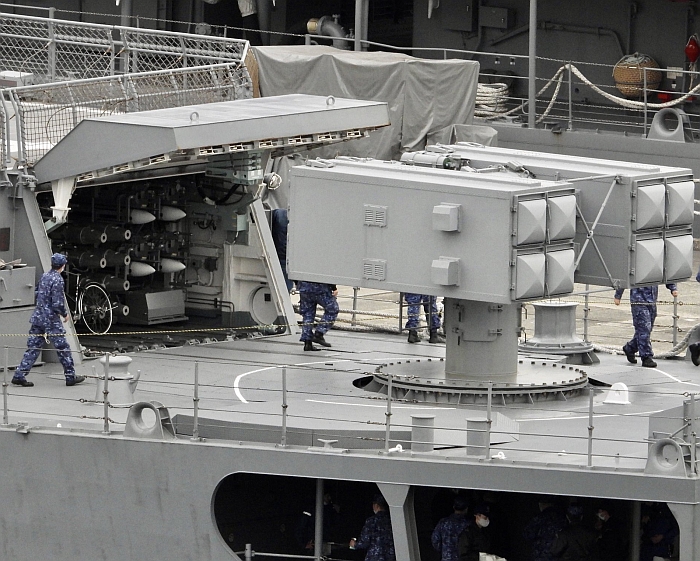
(上與下)日本海自艦上的MK-29海麻雀防空飛彈發射器,上為朝霧級驅逐艦的夕霧號(DD153),
下為初雪級驅逐艦的山雪 號(DD129)。攝於2014年6月14日日本橫須賀基地。


初雪級驅逐艦的瀨戶雪號(TV-3518 ex-DD-131)與山雪(TV-3519 ex-DD-129)的MK-29海麻雀
防空飛彈發射器。攝於2018年4月6日吳基地。

日本海自朝霧級驅逐艦天霧號(DD-154)的MK-29海麻雀短程防空飛彈發射器,攝於2023年10月14日橫須賀基地。
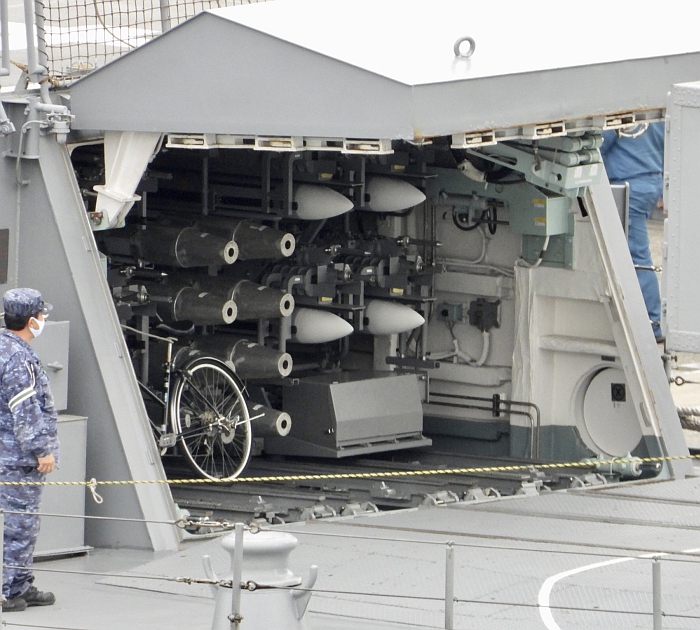
(上與下)日本海自朝霧級的天霧號(DD-154)艦尾MK-29海麻雀防空飛彈發射器。此時後方
的再裝填彈艙處於開啟狀態,內部有軌道式的再裝填彈架,使用時推出彈艙並沿軌道
前往MK-29發射器,迅速完成再裝填。攝於2024年1月橫須賀。

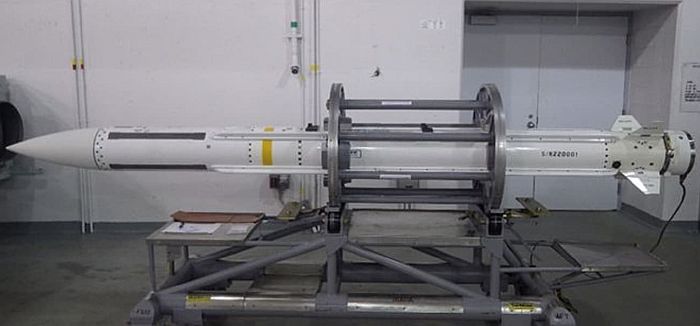
RIM-172 ESSM改進型海麻雀防空飛彈。注意後段彈徑比前段擴大,彈翼也完全更新。

(上與下)一枚由卡爾森號(USS Carl Vinson CVN-70)航空母艦的MK-29發射器射出的ESSM防空飛彈。


美國海軍人員正將一枚ESSM防空飛彈裝填入MK-29發射器中。
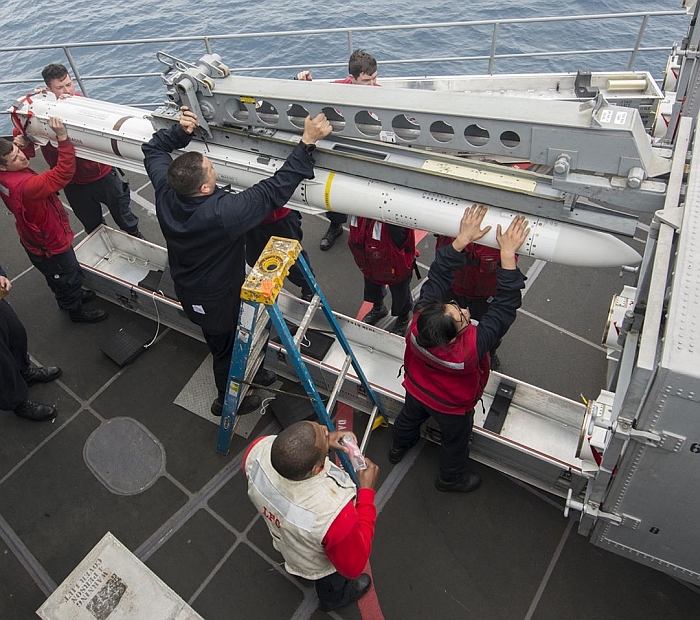
ESSM防空飛彈裝填到MK-29發射器的作業。

福特號(USS Gerald R. Ford CVN-78)航母的人員正在裝設滑軌,準備將ESSM飛彈裝填入MK-29發射器。

一枚ESSM防空飛彈由MK-41垂直發射器發射升空。

柏克級飛彈驅逐艦麥克.坎貝爾號(USS McCampbell DDG-85)為MK-41垂直發射器裝填
ESSM防空飛彈的MK-25四合一容器。攝於2004年5月5日。
測試中的ESSM Block 2飛彈。ESSM Block 2將整枚飛彈直徑擴展到跟後部推進器相同的
10吋,並引進主動雷達尋標能力(仍保留半主動雷達模式)
──by captain Picard
(主要參考資料:全球防衛雜誌294~296──灣仔:海軍艦艇守護神 海麻雀飛彈的演進)
|
RIM-7H/M:直徑20.3cm 長3.64m 全重231kg 戰鬥部重40.5kg 單節火箭推進 最大飛行速率2.645馬赫 最大有效射程15~22km 最小射程1.37km 半主動雷達導引RIM-162 ESSM:直徑25.4cm 長3.66m 翼展64cm 全重280kg 戰鬥部重39kg 雙節火箭推進 最大飛行速率4馬赫 高機動有效射程18km 最大射程30~50km 中途慣性/指令修正+終端半主動雷達導引 承包商:休斯(Hughes)、雷松 前身:點防禦飛彈系統(PDMS) 早在 1944年底二次大戰期間,美國海軍為了因應日本神風特攻隊自殺飛機攻擊,展開了美國海軍史上第一種防空飛彈計畫──「大黃蜂專案」,最後總共發展出RIM-2小獵犬(Terrier)、RIM-8護島神(Talos)與RIM-24韃靼(Tartar)等三種防空飛彈,合稱「3T」, 射程涵蓋16~120km,在1960年代左右服役。不過由於3T的飛彈發系統與後端雷達、射控系統體積都相當龐大,而且價格不斐,美國海軍還是希望引進一種體積更輕更小、射控更簡單、價格更為便宜的防空飛彈 系統,以普遍安裝在護航驅逐艦等二線艦艇上,作為基本的防空自衛(不需要掩護其他船艦)之用,這就是美國海軍點防禦(Point Defense)防空飛彈概念的起始。 由於二次大戰末期以來噴射機以及導引型反艦武器逐漸成熟,以人工操作的防空火砲面對如噴射機、反艦飛彈這樣出現在視線之後很快就能迫近的高速目標越來越困難,因而更增加了防空飛彈的需求。美國海軍第一個 輕型防空飛彈計畫,是加入美國陸軍從1959年與通用動力(GD)簽約發展的「撕裂者」(Mauler)野戰自走式短程防空飛彈系統。撕裂者以M-113裝甲運兵車為載具,整套系統包含一套搜索/射控雷達與九個發射管;飛彈的編號為MIM-46, 為了因應陸地上嚴重的雜波干擾,採用中途雷達乘波導引機制以及終端紅外線導引,具備全向攻擊能力,最大飛行速率達3馬赫,最大射程約8km,最大射高約6000m,彈徑140mm,全彈重量僅54.5kg;整套系統包含飛彈、搜索與射控雷達、控制台等全部都可裝在一輛M-113裡,體積十分緊致。美國陸軍展開撕裂者計畫之後 ,由於基本需求相似(都要攔截低空高速飛行的目標,並克服地面/海面造成的雷達反射雜波),美國海軍、英國陸/海軍與加拿大海軍也紛紛加入 ;美國海軍約在1960年加入,稱這個計畫為點防禦飛彈系統(Point Defense Missile System,PDMS),又稱海撕裂者(Sea Mauler),飛彈型號為RIM-46,當時美國海軍規劃中的諾克斯級(Knox class)護航驅逐艦的艦尾便預留安裝PDMS的空間,英國陸軍還為此放棄了本國研發中的ET.316輕型陸基防空飛彈。在1961年6月, 然而,受限於當時的電子科技水平,GD根本無法在MIM-46飛彈緊致的體積重量內,達到預定的技術指標,這導致撕裂者計畫一再延誤 ,在1963年降級成為一個純技術研發儲備的案子;英國陸軍眼看苗頭不對,在1964年趕忙重啟ET.316計畫,最後成為陸基的短劍(Rapier)防空飛彈,而英國海軍也在同年展開替代計畫( 最後演變成為海狼飛彈)彈,美國海軍亦開始研擬備案。最後,撕裂者終於在1965年12月取消 。而美國陸軍的替代品,則是從空軍AIM-9D響尾蛇(Sidewinder)空對空飛彈為基礎,衍生出陸基的檞樹(Chaparral)飛彈系統;由於飛彈升空後只能靠飛彈本身的紅外線尋標器歸向,不具備撕裂者所要求的全向攻擊能力(AIM-9D的尋標器還不具備全向搜索能力,只能鎖定噴射引擎噴嘴排出的高溫熱焰)。 第一代:基本點防禦防空飛彈系統(BPDMS)
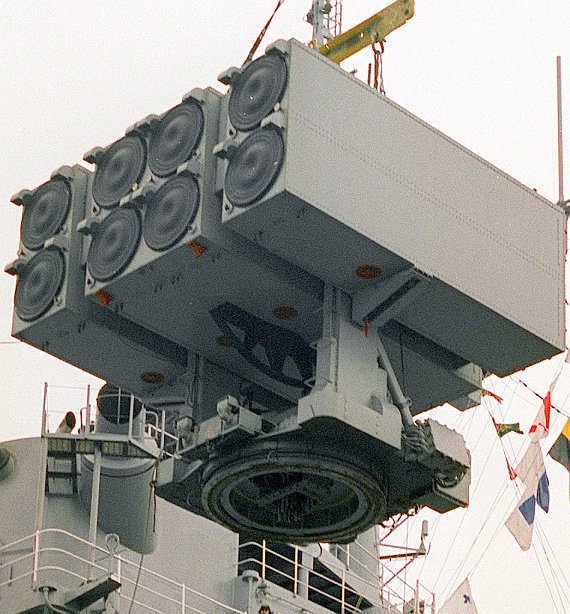
由MK-25發射器發射的海麻雀飛彈。此為第一代的BPDMS。 為了接替撕裂者,美國海軍繼續尋找可行的替代方案,其中一個是利用修斯飛機公司(Hughes Aircraft Company,今為雷松電子部門)開發的AIM-7麻雀(Sparrow)半主動雷達導引空對空飛彈衍生而來;由於當時AIM-7已經在美國海軍航空隊與空軍服役的服役多年,並且已經發展到第三代的AIM-7E,因此技術與風險相對較低。由於美國海軍已經得知蘇聯開發了數種反艦飛彈,就決定盡快發展以麻雀飛彈衍生的艦載防空飛彈系統,同時努力降低系統的複雜度,縮短研發期程,使之能盡快進入美國海軍服役。為了簡化研發工作,研發團隊大量運用麻雀飛彈原有的成套裝備以及美國海軍現有的武器系統設計,整套系統稱為基本點防禦防空飛彈系統 (Basic Point Defence Missle System,BPDMS),採用的飛彈幾乎完全與空軍的AIM-7E1相同,稱為RIM-7E-1海麻雀(Sea Sparrow),其MK-25飛彈發射系統則由MK-33三吋50倍徑火砲的砲座與MK-112 ASROC反潛火箭發射器的八聯裝發射箱組合而成;射控系統則以美國海軍現有、用來指揮三吋快砲的MK-63艦砲射控儀,再 以F-4B戰機的APQ-72 X波段機載雷達(即AIM-7E的射控雷達)修改成MK-115射控雷達,兩者組合成MK-71型飛彈射控儀。與原本的戰機空用雷達相較,MK-115主要的區別是擁有兩個直徑約60cm的天線,一左一右地架在原本MK-63火砲射控儀的人力瞄準控制台上,位於左邊的連續波天線專門發射雷達波束,右邊的天線負責接收雷達回波(當時還沒有應用脈衝重複頻率(Pulse Repetition Frequency,PRF)技術切割時間,所以連續波天線只能純粹發射波束,需要另一個專門的天線來接收回波)。此外,所有配備BPDMS的艦艇都裝備了AN/SPS-59或SPS-65 L波段近程搜索雷達,兩者均衍生西德西門子公司的MPDR-45脈衝都卜勒雷達,負責目標先期捕獲與方位指引,可在低空的海面雜訊中辨別出高速低飛的小型目標。 從現有組件拼湊成的BPDMS防空系統其架構的確簡單而便宜,經過短短三年不到的研發之後,首先在1967年2月裝備於諾克斯級護航驅逐艦布萊德雷號(USS Bradley DE-1041)上進行測試,但由於該艦馬上調往越戰戰區而很快就將這套測試系統拆除。BPDMS在1967年10月左右正式進入美國海軍服役。 從1971到1975年,美國海軍總共有約31艘船艦安裝了BPDMS。
BPDMS用來導引海麻雀飛彈的MK-115射控雷達,採用簡單的人力操作。
正從藍嶺號(USS Blue Ridge LCC-19)指揮艦上拆除的MK-115射控雷達,攝於1993年。 MK-115兩邊各有一個天線,左邊的連續波天線專門發射照射波束,右邊專門負責接收。
BPDMS的MK-25發射器,直接沿用ASROC反潛火箭的MK-112八聯裝發射箱。 BPDMS的操作方式十分單純;首先, 艦上的AN/SPS-59或SPS-65近程搜索雷達發現來襲目標並確認方位後,戰情室(CIC)立刻以語音電話將目標方位通知MK-71射控儀 的操作人員;操作人員在MK-71指揮儀的露天戰位上,用人力將雷達/光學射控平台轉向CIC提供的目標方位, 以MK-71射控儀的光學瞄準儀找到目標,並啟動MK-115射控雷達,待之確實捕捉目標後,便發射海麻雀飛彈; 在海麻雀飛彈飛行途中,操作人員隨時以人力調整MK-115雷達天線的指向,將目標保持在照射波之中,直到飛彈循著照明波擊中目標為止。此外,MK-25發射器的再裝填作業也仰賴人工進行。1960年代大部分美國海軍的新造艦都配備BPDMS,包括企業號核子動力航空母艦、前兩艘尼米茲級(CVN-68、69)核子動力航空母艦、諾克斯級護航驅逐艦、若干兩棲 登陸艦艇與支援艦艇等;其中,航空母艦的SPS-58搜索雷達擁有本身專屬的天線,而諾克斯級護航驅逐艦的SPS-58或SPS-65雷達則與SPS-10平面搜索雷達共用天線。 BPDMS的確在最短時間內滿足了美國海軍的基本防空需求 ,然而其系統根本限制也十分明顯;無論是戰情室的目標情資傳輸,到目標的捕捉、飛彈發射與導引, 整套系統大量仰賴人工,故整個系統追瞄的反應速率、射擊準確性乃至於飛彈最大射程,都取決於操作人員本身的技術 ,而且必須在射控儀操作人員確實「看見」目標之後才能開始接戰;當作戰環境日益複雜險峻時,戰情室與飛彈操作人員 在巨大壓力之下,發生人為失誤的機率提高,便很容易影響BPDMS的有效運作;加上新一代反艦飛彈不僅速度越來越快,還會降低彈道終端飛行高度、利用海面雜波隱藏飛彈時,幾無自動化程度可言的BPDMS終將力不從心。1970年出現的蘇聯P-15M TEPMNT(北約代號SS-N-2B),便以雷達高度計取代過去的氣壓高度計,使其末端飛行高度可以保持在15m以下,對美國海軍的防空飛彈構成了更嚴厲的考驗。 除了過度仰賴人力之外,BPDMS使用的RIM-7E-1的母型AIM-7E麻雀飛彈,在越戰中暴露出許多缺點,包括飛彈本身靈活度不足 (因為控制面佈置在彈體中部,產生的轉向力矩不足)、 無法有效對付迎面而來的高速目標、系統反應時間太慢、近發引信保險時間太長而導致近距離盲區過大等等。 原本空射的AIM-7E射程約28海里(45km),這是在已經擁有高速的噴射戰鬥機上發射的情況; 轉移到海平面上且速度極低的船艦平台發射時,飛彈完全需要以本身的推進火箭加速與爬升, 所以射程顯著降低,依照目標飛行高度約介於8.1~11.9海里(15~22km);考慮到 雷達捕獲目標以及整個系統反應都需要時間,所以實際上接戰距離可能只有5、6海里左右。 此外,AIM-7的中置控制翼面產生的力道,也無法滿足點防禦防空飛彈要求的高靈活度需求。 對於艦射的RIM-7E-1而言,由於反艦飛彈就是迎面來襲,而海面雜波則延遲了雷達發現掠海反艦飛彈的時機, 以致於發現目標時,反艦飛彈往往已經十分接近,因此提升飛彈本身的靈活度與反應速率是當務之急。 此外,為了讓BPDMS盡快服役,設計人員並沒有更改AIM-7E的基本結構,因此彈翼不能折疊, 所以必須使用體積龐大的ASROC發射箱才能容納翼展超過1m的RIM-7,佔用了太多體積與重量。 在1969年,進一步改良的AIM-7E-2開始服役,其改良後的導引系統反應速率提高,配備更強力的控制面驅動馬達, 並縮小穩定翼尺寸,使飛彈在低空環境更加靈活,能更快完成轉向。後來美國海軍也引進AIM-7-E2供BPDMS使用, 並改稱為RIM-7E-2。 總而言之,應急性質的BPDMS,終將無法滿足現代化海戰的防空需求。 第二代:北約海麻雀(NSSM)/改良型點防禦防空飛彈系統(IPDMS)
MK-29發射器發射海麻雀飛彈的瞬間。 就在應急性質的BPDMS剛進入美國海軍服役的1967年10月,埃及飛彈快艇以俄製SS-N-2反艦飛彈擊沈以色列艾拉特號(INS Eilat)驅逐艦,締造海戰史上第一次以反艦飛彈擊沈敵艦的戰例。 為了因應日趨嚴苛的反艦飛彈威脅,艾拉特號遇襲事件後,北約組織的美國、丹麥、義大利、挪威便簽署合作備忘錄,成立北約海麻雀計畫辦公室(NATO SeaSparrow Project Office,NSPO)以海麻雀防空飛彈系統為基礎,發展成北約海軍共通的船艦點防禦防空飛彈,此系統稱為北約海麻雀飛彈(NATO Sea Sparrow missile,NSSM),各國在1968年簽署發展合約。在1969年9月,美國雷松(Raytheon)公司(即麻雀飛彈的第二供應商)獲得了NSSM的主承包商合約。在1970年,比利時與荷蘭也加入此一計畫,加拿大海軍與荷蘭並展開合作,獨自進行另一套海麻雀系統發展。這些計畫主要都著眼於解決BPDMS自動化程度太低、飛彈性能不佳、佔用體積太大等問題。 到2010年代,總共有美國、加拿大、澳大利亞、比利時、丹麥、德國、希臘、荷蘭、挪威、葡萄牙、義大利、西班牙、土耳其等13個北約國家成為NSSM成員。 在2015年7月上旬,消息傳出日本有意加入NSSM集團,參與聯合研製並分攤成本,日本已經在稍早於5月北約於海牙的會議中瞭解更多NSSM集團運作的細節;這可能是日本首度試圖參與單獨跟美國以外的國際聯合軍備發展計畫。 美國的IPDMS 早在1967年,美國就已經展開一項名為先進點防禦防空飛彈系統(Advanced Point Defense Missile System,APDMS)的計畫,發展一種自動化程度更高的海麻雀防空飛彈系統,其關鍵組件包括一套新開發的目標獲得系統(Target Acquisition System,TAS),包含搜索雷達、紅外線偵測儀以及敵我識別器等。雖然APDMS爾後並沒有繼續執行,但TAS隨後便成為美國版改良型海麻雀防空飛彈系統的重要一環。 雷松主導開發的NSSM系統結合了一套由修斯開發的MK-23 L波段目標獲得系統(Target Acquisition System,TAS,另有專文介紹)、一套自動化的MK-91飛彈射控系統(Missile Fire Control system,MFCS,含MK-95 X波段照明雷達)飛彈射控系統與 一具輕量化的MK-29八聯裝飛彈發射器,整套系統被稱為NSSM Block 1或改良型點防禦防空飛彈系統(Improved Defence Missle System,IPDMS);整個IPDMS型號為AN/SWY-1(V),而MK-91射控系統與海麻雀飛彈發射器組合的系統型號為MK-57。MK-29八聯裝飛彈發射系統裝飛彈發射 系統(Guided Missile Launching System,GMLS)空重4.76公噸,滿載八枚飛彈總重7.03公噸,發射器尺寸為3.556m x 3.76m x 2.51m。 IPDMS的基本作業流程與BPDMS類似,由MK-23的雷達進行目標搜索、初期追蹤、識別以及排定接戰的優先程度,隨後就將系統決定優先接戰的目標方位傳輸給MK-91射控系統,MK-91開啟MK-95 X波段照明雷達並確實捕獲目標後,即指揮MK-29發射器轉向目標並發射飛彈; 然而不同於BPDMS,NSSM的整個作業──包含TAS雷達指派目標方位MK-91射控系統、照明雷達鎖定目標、飛彈發射以及飛行途中的持續雷達照明──完全自動化,操作人員只需坐在戰情室的顯控台前監控整個動作;此外,MK-91射控雷達與MK-23 TAS雷達的組合,對抗海面雜波、搜索低空目標的能力比BPDMS優秀得多。
美國版IPDMS採用的MK-95 X波段照射器。攝於尼米茲級航空母艦上。 MK-91飛彈射控系統的MK-95照明雷達採用X波段連續波調頻(FW-CW)操作,可進行目標追蹤與飛彈導控照明工作。與MK-115類似,每個MK-95包括兩具天線,其中一個專門發射連續照射波束,另一個專門負責接收回波; 然而,MK-91的操作與目標追蹤作業是全自動化的。 飛彈部分,雷松以RIM-7為基礎進行改良,推出適合艦載使用的RIM-7H。首先,RIM-7H擁有新設計的可折疊彈翼來縮減 儲存空間,折疊後的翼展只有62.6cm,發射出管後立刻展開;此外,還增加一個快速啟動單元(Rapid Run up Unit,RRU),將飛彈發射前啟動電子系統的整個暖機時間大幅縮減為8秒。換裝折疊彈翼與RRU的RIM-7E-1稱為RIM-7H-1,而換裝相同套件的RIM-7-E2則稱為RIM-7H-2,之後的RIM-7H-5則又換上一個改良後的近發引信。由於RIM-7H的儲存直徑大幅縮減,因此雷松 為之重新設計了更緊致的輕量化MK-29八聯裝發射器,將兩組四聯裝發射箱分別裝置在帶有水平/垂直向旋轉機構的發射座兩側,而再裝填作業仍仰賴人力。 IPDMS於1973年4月完成初期操作測試 ,第一套完整的IPDMS/NSSM Block 1防空飛彈系統工程原型結合第一套MK-23 TAS原型在1975年1月裝上諾克斯級的達昂斯號(USS Dowens FF-1070 ex DE-1070),在1977年12月完成作戰測評等最終測試,隨即進入美國海軍服役 ;而配套的MK-23 TAS則在1978年簽約量產,1980年服役。雖然NSSM Block1的自動化程度、反應速率比BPDMS大有改善,但其使用的RIM-7H-5防空飛彈對付低空飛行目標的能力仍然不足,易受海面雜波干擾。 荷蘭HAS版本海麻雀 至於在荷蘭、加拿大的獨立計畫中,荷蘭電信器材(Hollands Signnalapparaten,HAS)公司發展了一種名為M-22的輕量化追蹤/射控雷達系統;其中,M-22擁有一套結合了搜索與追蹤天線的組合式天線系統(Combined Antenna System,CAS),兩種天線共用同一個雷達發射機,並一同設置於一個蛋型天線罩內。搜索雷達的轉速高達60轉/分,目標更新速率快;後端射控系統接收搜索雷達的資訊,能同時搜索/追蹤數個目標,並辨認出最具威脅性的目標,隨即將單脈衝追蹤天線對準目標方位來鎖定該目標。如果結合雷松提供的連續波照明後端,M-22的追蹤雷達也能提供連續波操作模式,為半主動雷達導引飛彈提供照明。加拿大海軍率先採用M-22作為「加拿大版」海麻雀防空飛彈系統的射控中樞,安裝於四艘部族級(Iroquois class)驅逐艦上,飛彈部分則使用RIM-7E-2。值得一提的是,加拿大海軍認為BPDMS原本的MK-25發射器不僅太過笨重,而且結構不夠堅固,如裝在艦首,恐難以抵擋北大西洋強勁風浪的襲擊。因此,加拿大海軍為部族級驅逐艦設計一種特殊的伸縮式發射器,每座發射器具有四個發射軌,並具備迴旋/俯仰的能力。每艘部落級裝備兩組M-22天線與兩組四聯裝海麻雀飛彈發射器,發射器平時折收在船樓前方 一個大型艙室內,作戰時才打開艙室頂部甲板兩側的艙門將之伸出,發射完畢後自動縮回艙內,而此一艙室內部還設有自動化的再裝填彈艙。不過在實際使用中,此種MK-3伸縮式發射器的效能並不如預期理想,例如從彈艙中伸出部署的時間過長,啟動後需要好幾分鐘暖機,這些都影響了降低了作戰的反應速率。此外,加拿大這套海麻雀系統中,M-22射控系統和海麻雀飛彈間的整合也有點問題。 為加拿大完成加拿大版海麻雀之後,HAS繼續推出WM-25射控系統,除了CAS天線組之外,還可結合一至兩具Signnal生產、專門負責飛彈/火砲照明射控的「分離標定與照明雷達」(Separate Target Illumination Radar,STIR),可導引北約海麻雀防空飛彈系統 。STIR-180型的北約編號為SPG-503,天線直徑約180cm,採用X/Ka頻帶,其中X頻帶的頻率約10GHz,波長約3cm,使用時波束角約1.4度寬;而Ka頻帶頻率更高(約40GHz)、波長更短(約1cm),波束角僅0.3度寬,適合高精確度追蹤射控,但是有效距離也比X頻短。荷蘭的WM-25後來被荷蘭、比利時、西德海軍使用,荷蘭與西德共通研發的新巡防艦的WM-25都包含了CAS組與STIR-180照明雷達,荷蘭為寇騰納爾級(Kortenaer class),又稱標準型(Standard),而西德則為F-122巡防艦;至於比利時的威靈跟級巡防艦由於體型較小,只配備一個CAS而無STIR。爾後希臘、葡萄牙、澳洲向西德購買的MEKO 200巡防艦以及加拿大的哈利法克斯級巡防艦,均選擇以HAS的射控系統來搭配海麻雀防空飛彈,不過它們只有STIR-180照明雷達而CAS天線組。就連美國也引進了WM-25,修改後成為MK-92射控系統,配備於派里級巡防艦和飛馬級水翼飛彈巡邏艦上。 RIM-7F/M/NSSM Block II 從1972年1月起,雷松開始研發麻雀飛彈更新型的成員──AIM-7F,首先為其開發新的AN/DQS-35導引/控制系統組(Guidance and Coutrol System,GCS)。DQS-35在彈體後段兩側增設後向天線,接收後方照明雷達發出的後向參考信號(Rear Reference Signal),加上彈鼻內雷達接收天線接收從目標反射的照明雷達波的回波,比較兩者的都卜勒效應差距,就能解算出飛彈與目標之間的距離和接近速率,因此能從地面、海面背景雜波中輕易辨認目標的回波(因為高速目標的都卜勒效應遠高於背景雜訊);此外,後向天線也能比較兩邊信號強弱來評估飛彈是否偏離照射方向,進而修正航道,這能解決彈鼻尋標器天線大小限制而產生的定位精度問題。DSQ-35除了可使用艦載照明雷達的調頻連續波(FM-CW)方式之外,也可以使用高脈衝回複率的脈衝都卜勒(Pluse Doppler)信號,例如海軍F-14戰機的AN/AWG-9雷達與空軍F-15A戰機的AN/APG-63雷達。除了換裝DQS-35導引組外,AIM-7F也是麻雀飛彈系列中,第一個完全使用固態電子零件的成員,可靠度較先前的AIM-7E增加三至四倍,而且電子組件的體積可以大幅縮小;例如以往AIM-7E的雷達天線與導引/控制系統組佔據彈鼻到前部彈翼間的所有空間,戰鬥部位於彈翼之後;而AIM-7F的雷達天線與DSQ-35導引/控制系統組則只佔據彈鼻到前彈翼之間2/3的長度,從而騰出更多空間來安裝更大型的戰鬥部與更長的固態火箭推進藥柱。AIM-7F的戰鬥部增至41kg,並換裝射程延長的MK-58雙級固態火箭;MK-58的第一級發動機燃燒時效約3.5秒,緊接著點火的第二級則可燃燒12.5秒。 雖然北約海麻雀集團馬上注意到AIM-7F,不過由於NSSM Block 1才剛剛在1972年開始服役,因此也來不及立刻套用。唯一將AIM-7F將海麻雀飛彈系統結合的國家是日本,日本在1977年正式決定引進AIM-7F供航空自衛隊的F-15J使用,同時也一併用於規劃中的白根級直昇機驅逐艦(DDH),搭配荷蘭HAS的WM-25射控系統。由於當時北約海麻雀計畫室並未推出AIM-7F的折疊彈翼艦載版,因此日本海自決定繼續沿用BPDMS的MK-25發射器,以直接配合不能折疊彈翼的空射版AIM-7F;由於1979年美國企業號航空母艦大修時,將BPDMS換成MK-56型NSSM Block 1,原本的MK-25發射器被MK-29取代,因此日本便購入這些汰換下來的MK-25,裝在白根級上。 這種日本版海麻雀系統由於使用AIM-7F,性能比同時期北約海麻雀的RIM-7H好很多。 AIM-7F在1976年開始服役後,雷松又繼續研發進一步改良的AIM-7M。相較於AIM-7F,AIM-7M以新開發的反向單脈衝(Inverse Monopulse)半主動雷達尋標器取代過去的圓錐掃瞄(Conical Scan)尋標器;以往圓錐掃瞄尋標器需要持續的回波來判斷目標方位,因此敵方若採用欺騙式電子干擾(deception jamming),對飛彈尋標器發射干擾信號來冒充目標回跡,圓錐掃瞄尋標器就很可能上;而單脈衝尋標器則只需要接收一個雷達脈衝,就能 計算出目標的方位資訊,這是因為尋標器接收天線被劃分為四個區塊,彼此之間有些微的角度差,故每個區塊接收到的波束時間與強度略有不同;藉由比對各區塊接收波束的時間差,只需要接收一個雷達脈衝就能 計算出目標的方位資訊 。相較於以往的圓錐掃瞄雷達接收器,單脈衝尋標器擁有極佳的電子反反制能力,因為目標來源補上的干擾信號會被當成其他脈衝,不會與先前的雷達回波混淆,甚至還能藉此精確標定干擾方位來源,進行過濾或者干擾歸向。而之所以稱為「反向」單脈衝,是因為傳統的「正向」操作都是先放大信號,再送入都卜勒濾波器做處理,如此便會將雜訊(如海面雜波)一起放大,使得信號進入濾波器之前就嚴重失真;而AIM-7M的反向單脈衝則是先進行都卜勒濾波再放大,減少對都卜勒濾波器的干擾,最後能獲得較佳的運算結果,這必須歸功於靈敏度提升的新型都卜勒濾波器剛剛問世,可直接處理未放大的原始信號,反向單脈衝尋標器才能問世。此外,AIM-7M也換裝WGU-6/B導引/控制系統組,整合有可改變程式的導向計算電腦(Missile Borne Computer,MBC),是麻雀系列中第一個裝備此種系統的彈種。以往的麻雀飛彈(含AIM-7F)的所有功能與信號處理控制單元都是純硬體電路,運作流程被硬體的電路接線定死,若欲更改或新增戰術功能,就必須拆換不同硬體;而早期的AIM-7D在發射前,還需要依靠機上的雷達管制官根據戰術需要,手動設定適合的操作模式。而內建MBC的WGU-6/B導引/控制組則以軟體指令來控制各單元、信號處理器的操作,待執行的軟體指令儲存於電可擦除可編程唯讀記憶體(Electrically-Erasable Programmable Read-Only Memory,EEPROM)之內,只要透過操作介面控制更改EEPROM內的程式,就可變更飛彈操作程序,無須拆換硬體。除了新的尋標器之外,AIM-7M也換用改良後的近發引信,降低攔截低空目標時被地面或海面回波干擾而提前引爆的機率。AIM-7M仍繼續使用AIM-7F的M-58火箭發動機,兩者的尺寸、外觀與重量也相若。 在1970年代初期,義大利從美國引進了AIM-7E麻雀空對空飛彈的技術,由賽勒尼亞(Selenia)公司進行吸收,進而發展出蝮蛇(Aspide)飛彈系列 。蝮蛇飛彈推出空對空與艦隊空版本,空對空版本作為義大利空軍F-104S戰機的武裝,艦隊空版本則相當於義大利版本的NSSM系統。與原版AIM-7E相較, 蝮蛇的改良包括換上賽勒尼亞公司自行開發的反向單脈衝半主動雷達尋標器來取代AIM-7E原有的圓錐掃瞄尋標器,並改用SNIA-Viscosa製造的固態火箭發動機,推力與射程進一步提升。 整套蝮蛇MK-1防空系統稱為信天翁(Albatros),基本就是義大利版的北約海麻雀,搭配賽勒尼亞的RTN-30X射控雷達, 並使用與IPDMS相同的MK-29八聯裝發射器。 在1978年,北約海麻雀計畫室正式決定以AIM-7M衍生出RIM-7M,為NSSM Block 2的彈種,跳過了AIM-7F。過去BPDMS或NSSM Block 1採用全程半主動雷達導引,飛彈自始至終都沿著照明雷達的回波前進,一具射控雷達每次只能全程導引一枚海麻雀飛彈進行接戰。 而NSSM Block 2/RIM-7M由於擁有擴充彈性大的MBC導引系統,便不需要完全遵照雷達回波的方向直線飛行;飛彈在發射後能先依照導航系統設定的 航線飛行,直到彈道末端才進入攔截模式,沿著照明雷達回波抵達目標。由於再也不需要全程保持在雷達波束中飛行,加上各項控制軟體的不斷精進, 促成日後海麻雀飛彈的諸多重要發展,包括依照空氣動力效率較佳的彈道(先爬高再俯衝)飛行、實現垂直發射(見下文)、降 低多路效應等雜波干擾乃至於多目標接戰等等。 在1982年,改良的麻雀AIM/RIM-7M F-1構型推出,而更先進的RIM-7M-H構型則在1986年問世,使用WGU-6D/B導引系統。拜1980年代計算機科技長足進步之賜,這段時間內,AIM/RIM-7M系列的電腦運算速率、記憶體容量都有長足進步,因此陸續增加許多可大幅增加飛彈性能的控制軟體,包括導引/控制模式、自動駕駛、應付雜波干擾、電子反反制、消除海面多路效應(multipath effect)等等。所謂多路效應,就是雷達波追蹤海面或低空時,雷達波遇到海面、波浪造成的反射鏡像;當飛彈同時接收到目標回波與海面多路效應的回波時,被迷惑的機率自然大增,而這類問題對於海麻雀這樣用於攔截低空目標的近程防空飛彈而言,可謂尤其顯著。理論上,增加雷達尋標器天線的孔徑(尺寸),合成更窄、更集中的波束角,能減少波束直接照射海面的反射,然而飛彈有限的尺寸卻不可能讓天線孔徑大幅增加。X頻尋標器另一種降低多路效應的方式則是使用垂直偏振(vertically polarized)的雷達信號,這是因為海面反射的X頻雷達信號以水平偏振(horizontally polarized)信號為多,垂直偏振信號相對較弱。此外,根據實驗得知,雷達尋標器與海面的夾角為某一定值時,多路效應可降至最低;此一定值稱為布瑞斯特角(Brewster's Angle),不同波長、型態的雷達波就有不同的布瑞斯特角,而採用垂直偏振的X頻帶雷達信號在平靜海面的布瑞斯特角約為7度;這樣的飛彈的攻角維持在7度布瑞斯特角時,雷達尋標器的多路效應只有攻角維持2度時的1/4。 RIM-7P 在1990年,更新型的AIM/RIM-7P開始服役,首批生產型為Block 1。相較於RIM-7M-H,RIM-7P唯一的硬體變更,只有換裝低空性能進一步改良的DSU-34/B近發引信,其餘則都是軟體的改良。因此,RIM-7P的尺寸、重量與操作方式都與RIM-7M系列類似,部隊的操作、訓練與維修都不需要重大變更;然而拜更先進的電腦控制自動駕駛儀、更好的計算與記憶硬體之賜,RIM-7P的性能與效能有了顯著的提升,面對飛魚反艦飛彈之類第二代低空掠海飛行的小型目標時,攔截成功率大幅增加。RIM-7P Block1新增了低高度導引(Low Altitude Guidance,LAG)導引模式,在發射後係由自動駕駛儀指揮控制先向上爬升,衝到比目標高的高度後,便向目標的方位進行小角度俯衝, 直到彈道末端才飛入照明雷達回波之中並開始循波束前進,以適當的角度(如布瑞斯特角)對目標進行俯衝攔截。然而在實戰中,此種導引模式不容易拿捏最適合的俯衝時機,這與飛彈本身和目標的相對高度、位置、速率都有關;如果離目標太遠就開始俯衝,飛彈的俯角就會較小,而如果距離目標太近才俯衝,則俯角就會太大,兩種情況都會使飛彈角度偏離布瑞斯特角,導致雷達多路效應增加,降低命中率。因此,LAG模式的關鍵在於利用前置追逐式導引程式根據飛彈本身與目標的相對位置與運動,計算從發射到終端攔截所需的飛行時間(Time-of-Flight,TOF),使飛彈盡量能以接近布瑞斯特角的俯衝角度進行攔截;而這個前置追逐導引程式採用比例式導引(Proportional Navigation Guidance)。 RIM-7P Block沿用與RIM-7M-H相同的WGU-6D/B導引系統,LAG軟體為P-296。後續的RIM-7P Block 2又稱RIM-7P ++以計算速率更快、記憶體容量更大的WGU-23D/B導引系統來取代WGU-6D/B,但LAG軟體仍為P-296。早年RIM-7P的LAG程式係針對較近距離的攔截工作而設計,這是基於當時北約海麻雀系統普遍能進行的攔截距離。然而,日後由於艦上偵測與戰鬥系統日益改進,高目標更新速率的雷達能更早確認掠海目標的存在,火控戰系效能的提升則使攔截解算所需的反應時間縮短;而RIM-7P飛彈本身也由於可依照更高氣動效率航道飛行(由自動駕駛儀指揮)以及火箭推進器效能的提高,使得有效射程延長。上述兩者改進的後果,就是使北約海麻雀飛彈系統開始提前向更遠的掠海目標發射接戰,然而試射結果顯示RIM-7P飛彈在面對較遠距離目標的命中率降低了。研究顯示,RIM-7P在攔截較遠距離低空目標時,選擇的俯衝角度可能有很大的差異;當俯衝角度與最佳的布瑞斯特角相差太大時,多路效應就會帶來更大的雷達導向誤差,進而導致飛彈更容易脫靶。這個問題來自尋標器陀螺儀隨時間增加的誤差,以往接戰距離較短,陀螺儀本身的誤差還不需納入考慮;然而當有效射程增加後,陀螺儀的累進誤差便無法再被忽視。此外,P-296軟體的LAG模式以比例導引來計算飛彈進入終端彈道的俯衝角度,往往會產生一些不穩定的航道。 因此,隨後RIM-7P Block 2又進行軟體改良,改用新的P-381 LAG軟體。P-381增加「航道導引控制」(Trajectory Guidance Control,TGC)程式,根據飛彈在中途飛行階段尋標器向下追蹤目標過程中的角度變化,推估飛彈的實際航道,如此便能修正導航系統的累進誤差,使飛彈在彈道終端能以最佳化角度進行俯衝。此外,P-381軟體也改良了LAG程式,利用計算飛彈與目標之間的視線變化率偏置(Line-of-Sight Rate Bias,LSRB)的技術來修正原本的比例導引機制。在LSRB機制中,導航電腦透過目標速率和飛彈從發射到終端攔截飛行時間,計算出視線變化率的偏值,然後將此一偏值輸入導航系統的 開爾曼濾波器(Kalman Filter)來產生一組視線變化率,然後便可修正導航系統的加速指令,使飛彈的航道變得更為平滑。經過P-381 LAG軟體升級的RIM-7P,被稱為RIM-7P++。 在1980年代末期,美國展開一項關於飛彈的自動搜尋能力提升計畫(Missile Homing Improvement Program,MHIP),在原本的半主動雷達尋標器之外 ,又增加一具紅外線尋標器;這是因為當時美國啟用一種投擲假目標的電子反制技術,測試時發現單靠半主動雷達尋標器無法應付 ,而冷戰結束之際來自德國的情資顯示前蘇聯與華約國家的戰機普遍配置類似的技術,情況相當緊急,所以美國當時立刻決定引進為戰術對空飛彈加裝額外的紅外線尋標器 作為應急措施。MHIP應用於SM-2 MR Block 3B防空飛彈 之上,紅外線尋標器位於彈體前端整流罩側面。原本美國MHIP也包括麻雀空對空、艦隊空飛彈(空軍型號為AIM-7R,海軍艦載版則為RIM-7R),在前端天線罩中央增設一個相同的紅外線尋標器(為此半主動雷達尋標器需改為斜向來避開),然而 這個型號最後遭到取消,雖然完成測試但沒有付諸執行。 日後並沒有任何海麻雀實際採用這種雙尋標器設計,可能是美國海軍透過後端軟硬體方面的改良,能有效應付假目標,因此不再需要額外的紅外線尋標器。 垂直發射版海麻雀 在1980年代,海麻雀飛彈也開始朝垂直發射來發展,如此既能消弭發射器死角、不需要先透過艦艇機動進入射擊陣位(例如避開射線上的友軍船艦)才能發射,也能省去發射器再裝填與對準目標的時間。將海麻雀飛彈垂直發射化 係由加拿大海軍率先推動,主承包商為雷松公司。採用垂直發射時,如果依賴海麻雀飛彈本身進行轉向, 則從發射到轉向目標就需要較大的距離,可能導致錯失目標;因此,雷松在垂直發射海麻雀飛彈上加裝一個可拋棄的葉片噴射折流系統(Jet Vane Control,JVC), 此裝置是一個扣在彈尾噴嘴的環狀物,內有控制電腦以及一組液壓制動葉片,全系統重量15.8kg。在發射前夕,艦上射控系統將目標方位資料輸入JVC的電腦;飛彈點火後,JVC隨即 依照目標方位,控制彈尾的液壓葉片轉向特定角度,讓火箭發動機的噴流轉向,使飛彈垂直離開發射管後很快就能完成俯壓動作(Pitch over Maneuver,POM), 使飛彈轉向目標方位;當飛彈俯壓動作完成後,整組JVC裝置隨即脫離彈尾丟棄。實際測試顯示垂直發射海麻雀能在發射後1.8秒左右、離海平面高度50m、離發射艦水平距離僅65m處 ,便俯壓到水平姿態,並朝目標方位前進。雷松為RIM-7M/P等飛彈推出改裝套件,加裝JVC等裝置後,就能輕易變更為垂直發射版。加拿大海軍購買的首批垂直發射版 海麻雀飛彈由RIM-7M改裝而來,不過稍後便改用RIM-7P。 發射器方面,垂直發射海麻雀除了可整合於MK-41垂直發射系統之外,雷松也在1980年代初期開發小巧輕便且安裝容易的MK-48垂直 發射系統(另有專文介紹),專門搭配垂直發射的海麻雀飛彈。在1981年,垂直版海麻雀飛彈在加拿大海軍部族級巡防艦Huron號進行首次海上試射;在1984年,加拿大海軍正式購買 六套垂直發射海麻雀飛彈系統(搭配MK-48 Mod0垂直發射器),裝備於加拿大海軍在1983年簽約建造的首批六艘哈利法克斯級(Halifax class)巡防艦上。隨後,垂直發射版 海麻雀飛彈又獲得荷蘭、德國、希臘、丹麥、土耳其、紐西蘭/澳大利亞、日本與韓國等國的採用,其中荷蘭的道爾曼級巡防艦採用MK-48 Mod 1垂直發射系統,搭配荷蘭HAS公司的 SMART-S 3D對空搜索雷達與STIR-180照明雷達,希臘購自德國的MEKO-200HN巡防艦、日本村雨級驅逐艦、丹麥SF-300巡邏艦與SF-3500多功能支援艦、 韓國KDX-1廣開土大王級驅逐艦都使用MK-48系列垂直發射器 。而德國在1990年代初期規劃的F-123布蘭登堡級(Brandenburg class)巡防艦以及出售土耳其的MEKO-200 TN2B巡防艦、紐西蘭與澳大利亞的紐澳軍團級(ANZAC class)巡防艦以及日本高波級驅逐艦則使用MK-41系列垂直發射系統,每個發射管能裝填一枚。加拿大部族級驅逐艦在1990年代初期的大規模改良時換裝MK-41垂直發射系統 之後,除了能使用標準SM-2防空飛彈外,也能使用垂直發射版的海麻雀防空飛彈。 ESSM發展型海麻雀 1.NFR-90的發展 海麻雀飛彈系列的下一個重大發展,就是日後編號為RIM-162的海麻雀發展型(Evolved Sea Sparrow Missle,ESSM),起源於1985年展開的北約90年代巡防艦 替代計畫(NATO Frigate Replacement,NFR-90);當時總共有八個北約國家(美國、 英國、法國、西德、義大利、荷蘭、加拿大、西班牙)加入。 當時美國為NFR-90推動一個名為「北約防空作戰系統」(NATO Air-Wafrare System,NAAWS)的專案, 目標是發展一種具備同時間追蹤、接戰多個目標的防空系統,能應付飽和空中攻擊,宛若迷你版神盾系統。NAAWS由美國海軍自身的短程防空作戰系統(Short Range Anti Air Warfare System,SRAAWS)演變而來,原本SRAAWS的目標是發展一種比神盾系統相對簡單廉價、又能在較短距離同時攔截許多目標的系統,適合裝備於尺寸相當於派里級(Perry class)飛彈巡防艦的艦艇上。NAAWS包括以下幾個具體項目: 負責長距離對空監視的大量搜索雷達(Volume Search Radar,VSR)、能同時精確追蹤多個目標並指揮飛彈攻擊多個空中目標的多功能雷達(Multi Function Radar,MFR) ,並配合具備點防空自衛以及一定區域防空能力的防空飛彈系統。在1980年代,美國為了搭配神盾系統而發展出的標準SM-2飛彈,採用中途 指令更新(飛彈下鏈回報本身位置參數給母艦,母艦計算出修正指令並上鏈傳輸給飛彈)、終端半主動導引模式, 彈道初期先上升到低阻力的高空域巡航,透過資料鏈接收母艦上鏈傳輸的修正指令,由自動駕駛儀計算航道,進入彈道終端後才開啟尋標器來接收射控雷達回波;照明雷達 引進分時照射方式,一具雷達就能分時導引多枚不同的在空飛彈來攻擊多個目標。因此,SM-2自然成為NAAWS的重點指標,而進一步改良的發展型海麻雀, 也以SM-2的諸多技術特徵作為發展標的。 美國有四個團隊投標NAAWS提案,分別以通用電機(GE)、西屋(Westhousing)、休斯、雷松為主承包商;此外,西德、荷蘭 也聯手推出NAAWS方案,以HAS開發的主動相位陣列雷達(APAR)為核心,搭配SM-2與海麻雀飛彈。除了美國主導的NAAWS之外,法國、義大利則推出「未來面對空飛彈族系」(Future Surface to Air Family,FSAF,即Aster防空飛彈系統)來角逐NFR-90的防空系統。其中,GE主導的系統堪稱神盾系統的縮小版, 其核心是一套由神盾系統SPY-1相位陣列雷達縮小衍生而來的「巡防艦相位陣列雷達」(Frigate Phase Array Radar,FPAR),仍採用S波段,能同時滿足VSR與MFR的需求; 此外,搭配的防空武器系統包括MK-41垂直發射系統以及SM-2、現有RIM-7P垂直發射海麻雀防空飛彈等。至於雷松的方案則以研發中的C-MAR型C波段多功能相位陣列雷達 為主(衍生自愛國者防空飛彈系統的MPQ-53相位陣列雷達),西屋的方案則以用於B-1B戰略轟炸機的AN/APQ-164電子掃瞄雷達(這是美國空軍第一種實用化的機載相位陣列雷達) 為基礎來發展MFR;至於休斯的方案則以現有的MK-23目標追蹤系統(TAS)發展出I-TAS,是各家方案中體積重量與成本最低者,然而性能也相對最低。 總括而言,GE宣稱他們的縮小版神盾是各方案中性能最好且最為成熟(已有神盾系統的實績)者,雷松的C-MAR與西屋的APQ-164衍生型都還沒有實際運作的 成品,而休斯的I-TAS顯然性能差一大截;然而,GD的縮小版神盾系統,顯然是全部方案中體積重量最大、架構最複雜、成本最鉅者,其他三組團隊都 設法以較簡單的組合方式來滿足基本的抗飽和攻擊防空需求。 飛彈方面,GE的縮小版神盾以SM-2與現有的垂直發射版海麻雀飛彈來達成區域防空與近距離防空的功能,而雷松與休斯這兩家麻雀飛彈的 生產廠商,則打算大幅改良海麻雀的性能(包括延伸射程、強化多目標接戰能力等),如此只需要一種比SM-2相對輕巧便宜的飛彈,就能滿足NFR-90 的近距離防空需求,擁有較高的成本效益。雷松與休斯同樣在1988年展開改良型海麻雀防空飛彈,兩者的許多思維與方向均十分類似, 包括把原本麻雀飛彈位於彈體中段的控制面移到彈尾,以提升飛彈運動性,此外加裝自動駕駛儀以及中途指令修正所需的資料鏈,以套用類似SM-2的 中途指揮/終端半主動分時照射導引機制。兩種設計的彈體前段直徑都維持原本海麻雀飛彈的8吋(203mm),後段火箭推進器 的直徑便增為10吋(254mm),更大的火箭推進裝藥量使射程得以延長。氣動力構型方面,休斯版改良型海麻雀的彈翼結構類似標準飛彈,包括位於彈體 中段的十字形安定面以及位於彈尾的十字形控制面。而雷松版ESSM的構型則類似愛國者飛彈,只在彈尾設置一組十字形控制面;也因此,雷松版改良型海麻雀在早期暫時被稱為RIM-7PTC,TC代表尾翼控制(Tail Control) 。兩者的最大翼展(尾翼寬度)都比原本海麻雀中段彈翼折疊後的尺寸還低,緊致性大增,這使得雷松、休斯的改良型海麻雀不僅都能相容於原本 的MK-29飛彈發射器,而且還能配合FMC新開發、專為ESSM發展的MK-25四合一(Quad-pack)發射箱模組,每個四合一發射箱能裝填四枚,卻僅佔用一個MK-41發射管的空間,如此裝備MK-41發射器的艦艇就能配備四倍於發射管數量的 改良型海麻雀,大幅增加了防空火力, 同時也節省更多彈位來裝填其他武器。此外,兩種改良型海麻雀最初都擁有前述MHIP計畫的輔助用紅外線尋標器,但最後遭到取消, 仍維持單純的半主動雷達尋標器。 值得一提的是,先前擁有豐富的海麻雀飛彈系統整合經驗的荷蘭HAS,也在休斯的NAAWS與改良型海麻雀發展團隊之中。 雷松還另以RIM-7PTC為基礎,發展一種擁有更大型火箭的衍生型,稱為長式船艦防衛飛彈(Long Ship Defense missile,LSDM),射程與飛行速度都進一步提高。雷松打算以LSDM與RIM-7PTC進行高低組合,其中LSDM擔負有限度的區域防空,RIM-7PTC則負責貼身防衛。至於休斯則認為該團隊的改良型海麻雀的 最大射程已經與SM-1 Block 4B相當,因此沒有必要再發展另一種型號;如果需要對付更遠的目標,就應該使用SM-2。 相較於雷松、休斯大幅改變海麻雀飛彈的設計,雷松集團還曾提議以該集團為鷹式飛彈第三期改良(PIP3)研發的鷹式低空同時接戰(Low Altitude Simultaneous Hawk Engagement,LASHE)系統 來改良海麻雀飛彈。先前海麻雀飛彈沒有分時照射機制,一具照明雷達頂多只能輪流為兩枚先後發射的海麻雀進行照射;如果維持原有海麻雀飛彈的系統架構,且欲增加 同時導控飛彈的數量,就只有增加照射頻道一途,然而對巡防艦等級的艦艇而言,通常只有裝置兩具傳統射控雷達的空間。而雷松的LASHE則以九具固定式的 天線組成一個涵蓋船艦周遭整個半球的照射區域其中八具天線用於涵蓋360度的水平方位,每具天線涵蓋範圍是45X75度;另一具天線用於涵蓋天頂,涵蓋範圍60X60度。 由於這些天線的波束很寬,彼此涵蓋範圍大幅重疊,因此不需要笨重複雜的穩定式基座,可以降低重量與成本;而即便艦體大幅搖晃約15度,船艦周遭仍能有穩定的 雷達涵蓋半球。理論上,LASHE能以遠低於神盾系統的重量與複雜度,達成同時接戰多目標的能力,同時也不需要大幅修改既有海麻雀飛彈的設計;然而, 最後美國海軍並未採用此一提議,主因是LASHE的設計顯然分散了照明功率,過寬的波束也對照明精確度帶來負面影響;面對海面雜波以及雷達截面積低的 小型掠海目標,乃至於當時已出現的反艦飛彈彈翼匿蹤設計,LASHE的設計勢將力不從心。 由於參與NFR-90的國家數量龐大,各國對其需求與理念互異,然而整個計畫卻沒有一個有效的主導者與決議機制,導致對載台基本設計乃至於主要作戰裝備等關鍵規格根本無法取得共識,加上各國對於攸關利益的 系統選擇、工作量分攤、成本分擔等亦有諸多紛歧,種種因素使得整個計畫裹足不前 、窒礙難行。在1989年9月到12月,英國、法國、義大利、西班牙、西德相繼退出。在1990年1月 荷蘭宣布退出之後,NFR-90隨即宣告撤銷,而NAAWS也隨之消失。NFR-90與NAAWS遭到取消後,先前參與NFR-90的國家又各自提出替代的先進防空艦艇與防空戰系方案。 然而,NAAWS的結束卻不意味改良型海麻雀防空飛彈的終結。相反地,當時已經有13個成員國的北約海麻雀集團, 都同意繼續以北約海麻雀為基礎,繼續發展更新一代的近程艦載防空飛彈系統,以因應當時日益精良的歐、俄反艦飛彈。 例如,1980年代末期的法製飛魚Block 2反艦飛彈,已經使用低雷達反射性材料來製造彈翼與天線罩,同在彈道末端採用不規則機動 ,將大幅減低方陣等機砲式近迫武器系統的效能;而在1980年代末期,蘇聯現代級飛彈驅逐艦使用的3M80反艦飛彈(北約代號SS-N-22) 也引起美國極大的關注,因為此種超音速反艦飛彈在終端彈道終端,還會進行超音速掠海不規則動作;至於法國 、西德在1980年代開始發展的ANS超音速反艦飛彈,則兼具擁有小巧的體積、2馬赫超音速飛行性能以及可能高達15G的終端迴避動作 ,堪稱當時最具潛在威脅的反艦飛彈。當時美國海軍將SS-N-22反艦飛彈列為B類威脅(Threat-B,超音速掠海飛行並進行約10G的終端機動) ,將ANS列為C類威脅(Threat-C,威脅B的加強版,超音速掠海飛行並進行約15G的終端機動);而 改良型海麻雀就被美國海軍要求能攔截這類能進行超音速高負載迴避動作的先進反艦飛彈。 ESSM發展型海麻雀防空飛彈 在1995年,休斯的改良型海麻雀方案擊敗雷松,當時休斯仍宣布將與雷松合作發展,並保持先前麻雀飛彈系列以來,兩家同時生產的競合模式。然而在1997年,雷松購併了休斯,因此 改良型海麻雀的研發主導權再度回到雷松手中。此後,改良型海麻雀獲得了RIM-162的正式編號以及發展型海麻雀(ESSM)的名稱。 此時ESSM的基本構型沿用自先前的休斯版本設計 ,彈體前段維持原本8吋的直徑,後段則換裝新的MK-143 mod0固態雙節火箭推進器,直徑擴展為10吋(25.4cm),整體長度大致維持相同;MK-143 Mod0效能、推力增加而出煙量減少,有助於減少對發射艦光電偵蒐儀的干擾。ESSM彈體中段設有低展弦比的十字形安定面, 彈尾則有十字形控制面,並使用RIM-7P++業已證實成熟可靠的半主動雷達尋標器,此外也沒有增設額外的紅外線尋標器 。ESSM控制面的控制制動器組(Control Actuation Assembly,CAA)沿用了AIM-120A先進中程空對空飛彈(AMRAAM)的WCU-11/B制動組件 。ESSM使用一個大幅簡化的JVC向量推力控制系統作為垂直發射後的轉向之用 ,同樣在完成轉向之後就脫離彈體;與原本北約海麻雀的JVC相較,ESSM由於改用尾翼制動,尾翼的制動器機構遂直接連動JVC噴嘴葉(透過機械耦合),使兩者同步動作。因此ESSM的JVC就 完全與飛彈的控制系統結合而不是獨立作業,省略了電腦、熱電池,可節省許多重量與成本。如同前述, 雖然推進器直徑增加,但ESSM的翼展仍比RIM-7P低了15cm。
一枚準備裝填的ESSM防空飛彈。平時彈翼為折收狀態。 為了配合MK-41垂直發射器,美國推出MK-25四合一發射器,每個MK-25能容納四枚ESSM;每個MK-41發射管可裝入一個MK-25發射器,一個MK-41發射管就能容納四枚ESSM。而 雷松也以MK-48 Mod3垂直發射器也衍生出配合ESSM的DP-48(Dual Pack)構型,原本容納一個RIM-7P發射管的空間被兩個ESSM發射管取代,每個發射單元可容納12枚ESSM,火力攜行量增加一倍(過去MK-48每單元容納六枚RIM-7系列) ;爾後DP-48發展成MK-56輕型垂直發射器。而早期MK-48垂直發射器換裝ESSM的版本包括MK-48 Mod4/5等,仍維持每個發射管裝填一枚。原本MK-29發射器也經過修改來相容ESSM(每個發射管裝填一枚,彈翼在發射管內處於展開狀態),發射器型號稱為MK-29 Mod4/5。 相較於原本的北約海麻雀系列,ESSM換用能量更高的推進器,提高了有效射程; 新的尾部控制面提供比原本中部控制面更強的控制力矩,增加了靈活度;而 彈體中部新增的低展舷比十字安定面也提高了彈體升力。ESSM最大射程增加至30~50km, 最大高機動射程18km,飛行速度2.5~3馬赫(最高可達4馬赫),能做出加速度35~50G的劇烈運動, 並號稱能應付以4G閃避動作前進的超音速反艦飛彈,而加大的射程亦使其擁有更多波次的攔截機會。 ESSM的最大射程已經超越傳統「點防禦防空飛彈」的範疇,加上其體積小、備彈密度高, 使得中/小型艦艇的防空火力能輕易升級;不過ESSM的造價也不便宜,超過標準SM-1飛彈。 另外,ESSM雖然帳面及現射程可達到50km左右,看似與SM-1相當,但實際上SM-1的火箭發動機裝藥量遠超過ESSM(SM-1發射重量超過ESSM兩倍),只因為ESSM使用 優化的彈道以及射控機制,在特定條件之下才能發揮50km級的極限射程(而且此時彈道末端早已沒有動力),實際上ESSM發動機的實際燃燒行程只有前18km左右;而採用全程半主動雷達照射的SM-1發動機則是以直線飛行並全程燃燒,後來改用分時照射技術與拋物線彈道的第一代SM-2雖然沿用與SM-1相同的發動機,但最大射程就比SM-1提升將近一倍來到74km左右。 因此,以ESSM的射程,要當作保護艦隊中其他船艦的「區域防空飛彈」,可能仍 稍嫌不足。不過SM-2因為彈體較大較重,前進動量較大、需要更多能量才能轉向,垂直發射後需要往上衝至少1000英尺才能讓飛彈轉向水平,因此雖然帳面上SM-2後期型可以攔截高度在15到20公尺的低空目標,但發射後需要較長的時間轉向並向下俯衝,有可能來不及追上高速迫近的掠海目標;而ESSM體積與重量較低,加上有向量推力系統來協助轉向,因此發射後能更快地轉向目標飛行,更適合攔截迫近的超音速掠海反艦飛彈。 ESSM的導引機制從原本 北約海麻雀的半主動雷達照射,改成類似標準SM-2的中途慣性加指令修正模式(透過X頻或S頻資料鏈) 加上終端半主動雷達分時照射,飛彈本身擁有自動駕駛儀與資料鏈。ESSM不需要受制於照明雷達波而採用浪費燃料的筆直彈道, 可透過慣性導航系統的參考點先爬升至空氣稀薄的高處,一方面可減低空氣阻力,另外也能儲存飛彈的位能,可增加有效射程以及追擊飛彈時的動能。此外,採用中途導引機制使得ESSM在搜索雷達初步截獲目標後就能立刻發射,在空中接收發射艦的上鏈指令修正航道逼近目標;而早期的海麻雀必須等到搜索雷達捕捉並交班給射控雷達確實照射到目標後,飛彈才能發射(因為飛彈一升空就立刻需要照射回波來導引),因此ESSM可進一步節省寶貴的反應時間。 自動駕駛儀使ESSM只需接受短暫的資料上鏈更新以及間歇的終端照明,就能自動計算出航道參數,再透過下鏈傳輸將本身位置回報給艦上射控系統,這使艦上的資料鏈、射控雷達能同時支援更多的在空飛彈 ;進入彈道終端時,射控雷達採用「分時」方式輪流為多枚飛彈進行照射 ,每枚飛彈只需要間歇地接收照明雷達回波來更新自動駕駛儀的目標位置,並透過下鏈傳輸將飛彈本身位置回傳到母艦射控系統,射控系統再根據各飛彈位置來排定照明雷達的輪流照射工作, 因此一具射控雷達能同時導引三至四枚ESSM接戰不同的目標。 早期ESSM共有四種版本,主要差別是與艦上射控系統之間的資料傳輸;第一種是RIM-162A,裝備於擁有MK-41垂直發射系統與AN/SYP-1相位陣列雷達的神盾艦艇, 使用S波段的雙向資料鏈(上鏈接收/下鏈發送),艦上發送上鏈更新指令以及接收飛彈下鏈回報都由神盾系統的SPY-1系列相位陣列雷達負責;第二種是RIM-162B, 是為 韓國KDX-2、紐澳軍團級 、高波級、荷蘭LCF與德國F124之類擁有MK-41垂直發射器但無神盾作戰系統的艦艇設計的版本,飛彈上只有單向X波段資料鏈(上鏈),由艦上X波段照明雷達負責上鏈傳輸 指令給飛彈,飛彈本身不會下鏈回報;第三種為RIM-162C,用於日本村雨級、加拿大哈里法克斯級這類使用MK-48垂直發射系統的艦艇,同樣採用X波段單向 (上鏈)資料鏈;而最後一種RIM-162D則是為傳統MK-29發射器設計的版本,亦採用X波段單向(上鏈)資料鏈。日後美國海軍為標準、ESSM防空飛彈開發新的資料鏈(例如P3I,詳見標準防空飛彈一文),新的X波段資料鏈採用數位化波束成形與控制來適應X波段多功能相位陣列雷達,並且兼具雙向(上/下鏈)能力,適用於標準SM-2、SM-6以及ESSM系列,而這種新的數位資料鏈也是標準、ESSM共通的聯合通用波形資料鏈(JUWL)的基礎。 供DDG-1000松華特級(Zumwalt class)陸攻驅逐艦以及福特號(USS Ford CVN-78)航空母艦使用的ESSM Block 1防空飛彈都經過特別修改,可適應間斷照射波(ICWI)以及換裝JUWL,以配合這兩種艦艇上負責終中途上鏈以及終端照射的AN/SPY-3 X波段多功能相位陣列雷達。 首先決定採用ESSM的國家包括德國、荷蘭與西班牙等,德國、荷蘭將之裝備於兩國的TFC巡防艦計畫,西班牙則拿來裝備該國F-100小神盾巡防艦,這些新型艦艇都是上述三個國家用於接替NFR-90的計畫。美國則決定以ESSM搭配RAM公羊短程防空飛彈來取代機砲式的方陣近迫武器系統,構築新一代的美國艦隊近程防空火網。其中,神盾艦艇搭配SM-2與ESSM,航空母艦、兩棲艦艇使用RAM與ESSM,並搭配1990年代新開發的船艦自衛系統(SSDS,另有專文介紹),將艦上所有偵測、電子戰、資料練與防空飛彈系統整合起來,大幅縮減系統從偵測、評估、運算到發射的反應時間,以爭取對抗超音速反艦飛彈時的緊迫時效。與SM-2相同,ESSM的資料鏈也與美國在1990年代開發的協同接戰能力(CEC)相容,能透過友軍單位進行射控導引,更能充分發揮ESSM的最大攔截射程。
(上與下)ESSM由MK-41垂直發射器發射升空的畫面,每個MK-41發射管可容納一組 MK-25四合一發射箱來裝填四枚ESSM。此為挪威海軍南森級巡防艦。
發射升空的ESSM 在1998年,ESSM進行首次試射,包含由四合一垂直發射單元來發射。在2000至2001年,ESSM在新墨西哥州白沙(White Sands)測試場進行發展與作戰測試(Developmental Testing/Operational Testing,DT/OT),項目包括垂直發射、全程半主動雷達導引攔截飛彈靶、以神盾系統的S波段資料鏈進行中途指揮/終端改為半主動雷達導引等等。在測試中,ESSM也遇上一些問題,例如飛彈天線罩曾有兩次脫落,故其設計經過修改。完成地面試射後,ESSM又在加州海岸的Point Mugu海上測試場,安裝在美國海軍水面作戰研究中心(Naval Surface Warfare Center)的迪卡圖號(USS Decatur EDDG-31)防衛系統測試艦(Self Defense Test Ship,SDTS)上進行實彈測試,此時該艦裝有SSDS船艦自衛系統、包含MK-23 TAS目標指示系統、兩座MK-91照明雷達與一座MK-29八聯裝發射器在內的北約海麻雀防空飛彈系統。在試射時,ESSM的噴流有時會干擾位於彈尾的後方參考信號(Rear Reference Signal,RRS)接收天線,這是用於接收後方來自母艦照明雷達波束的裝置,與尋標器接收的回波比對,可確保飛彈正確地保持在波束的方向上;爾後ESSM將RRS單元移至前段導引段附近的位置,問題遂迎刃而解。此外,ESSM初期的折疊尾翼曾兩次發生故障,導致飛彈墜海;在2001年底,ESSM先暫時換用固定尾翼進行測試,成功進行由X波段資料鏈中途指揮、終端轉為半主動雷達照射模式,並擊落模擬反艦飛彈的測試,稍後再換上改善後的折疊尾翼繼續測試。 完成OT/DT之後,ESSM隨即進入定型投產前的作戰測試評估階段(Operational Testing and Evaluation,OT&E),在最接近實戰的環境下對模擬反艦飛彈的飛靶進行測試,而模擬的反艦飛彈需符合北約海麻雀各會員國情報單位所提供的全部假想威脅。在OT&E測試期間,發射ESSM的迪卡圖號SDTS艦的戰系自動化操作程序經過嚴格的標準化,避免戰系結果影響ESSM的測試結果。在ESSM首先成功攔截兩枚模擬高亞音速 掠海反艦飛彈的BQM-74飛彈靶,期中第一枚飛靶採用直線飛行,被沒有彈頭的ESSM直接命中摧毀;第二枚BQM-74進行上、下、左、右等迴避動作,以模擬法國MM-40 Block 2,結果沒有彈頭的ESSM在近發引信生效以及殺傷半徑內掠過目標 ,等於攔截成功(美方認定的脫靶距離是飛彈直徑的兩倍)。第三個目標是以掠海超音速直線飛行的MQM-8G汪達爾(Vamdal)EER飛靶,第四個目標則是採用超音速、高角度俯衝的MQM-8G EER來模擬前蘇聯P-700花崗岩(北約代號SS-N-19)重型反艦飛彈(美國將之規類為Threat-A),結果這兩個目標都被無彈頭的ESSM直接命中摧毀。接下來是最具挑戰性的科目,攔截兩個在很短的時間間隔內由同一方向相繼出現 、並以超音速飛行的MQM-8G EER飛靶,兩個飛靶接近時都進行10G以上的機動迴避,以模擬俄製SS-N-22反艦飛彈;結果SDTS的戰系偵測到目標後,先後自動發射兩枚ESSM,成功攔截這兩個目標。最後一個科目則是由一架P-3C巡邏機發射一枚魚叉反艦飛彈,也被ESSM成功攔截。於是,ESSM以100%命中率的漂亮成績,通過了OT&E測評階段。隨後 在2002年7月,ESSM在伯克級Flight 2A飛彈驅逐艦的夏普號(USS Shoup DDG-86)進行由神盾系統指揮ESSM接戰的測試。第一種實用化的ESSM為Block 1。 在2003年1月 ,澳洲海軍第三艘紐澳軍團級巡防艦瓦拉蒙格號(HMAS Warramunga F-152)裝備了ESSM飛彈,成為全球第一艘實際部署海麻雀ESSM的艦艇,而澳大利亞也成為全世界第一個正式使用ESSM的海軍 ;在2003年10月,瓦拉蒙格號在夏威夷的美國海軍飛彈射擊場(USNPacific Missile Range Facility)進行ESSM試射,並首度運用協同接戰能力(CEC)技術,將射出的ESSM飛彈轉移給其他單位的照明射控雷達導控。 在2003年11月27日,荷蘭海軍LCF飛彈巡防艦首艦七省號 (HNLMS De Zeven Provinciën F-802)成功進行了首次ESSM防空飛彈的試射,而這不僅是ESSM首度由採用間斷照明(Interrupted Continuous Wave Illumination,ICWI)技術的APAR X波段相位陣列雷達進行射控的紀錄,也是史上第一次由ICWI導控一枚半主動雷達飛彈的紀錄。在2008年10月7日於演習中,美國海軍約翰.史坦尼茲號(USS John C. Stennis CVN-74)上的MK-29發射器發射一枚RIM-162D ESSM飛彈擊落靶機,這是ESSM進入美國海軍服役後第一次在艦隊戰備演訓中締造擊落記錄。 就在ESSM進行測試時,西方情報單位又獲知俄羅斯最新的3M-54反艦飛彈(北約代號SS-N-27俱樂部(Club)),其中一種型號採用兩段式飛行,在巡航階段使用次音速飛行,終端階段突然加速至接近3馬赫衝向目標。當時美國海軍沒有適合的靶彈來模擬這種被定為「威脅-D」(Threat-D)的新武器,改裝自除役的護導神防空飛彈的MQQ-8 EER即將耗盡,而由美國從俄羅斯引進的Kh-31改裝的MA-31飛靶又未達指定性能(註),無法有效模擬威脅;因此,美國海軍決定ESSM的後續作戰測評(Follow-on OT&E,FOT&E)延遲到取得適當飛靶再進行,以模擬攔截「威脅-D」的目標。 總計ESSM的發展工作由美國海軍以及原本北約海麻雀集團11個會員國中的9個合作進行;隨後除了這10個北約海麻雀集團(含美國)採用ESSM之外, 也透過美國海外軍售管道(FMS)出口給日本、阿聯酋與泰國。
ESSM Block 2 在2000年代,北約海麻雀計畫辦公室(NSPO)開始規劃下一階段的ESSM Block 2,具備主動/半主動雙模式尋標器。在2014年,加拿大為共同開發ESSM Block 2而支付2億加幣。 ESSM Block 2換裝與SM-6相同的X波段主/被動雷達尋標器(來自AIM-120C7),並將整枚飛彈的彈徑都擴展到10吋,使戰鬥部 與火箭推進器裝藥量都增加,使得射程、飛行性能和殺傷力都獲得增強。過去AIM-120飛彈的主動雷達尋標器能提供的信噪比一直不如艦上的照明雷達,使得ESSM不願意換掉原有的半主動雷達導引機制,這直到AIM-120不斷改良之後才實現,並出現在SM-6防空飛彈上。由於對付低雷達截面積目標 或面對強烈電子干擾時,飛彈主動雷達尋標器的功率可能力有未逮,因此ESSM Block 2將與SM-6一樣,繼續保有半主動雷達導引模式。此外,ESSM Block 2也採用美國海軍新開發聯合通用波形資料鏈(Joint Universal Waveform Link,JUWL),此種資料鏈會逐步推廣於美國海軍所有的標準SM-2/6以及ESSM等防空飛彈,使飛彈整合到CEC協同接戰網路中,獲得中途資料更新。 美國海軍 表示,現有的ESSM能有效對抗各種空中威脅,如高速敏捷的掠海反艦巡航飛彈( Anti-Ship Cruise Missile,ASCM)、低速空中目標(Low Velocity Air Threats,LVAT)如直昇機以及在水面上高速靈活機動的目標(如快艇)等等;而增加主動雷達尋標器的ESSM Block 2則使飛彈對抗現今與未來威脅的能力更上一層樓。 在2015年4月,雷松獲得ESSM Block 2的工程發展製造合約(Milestone B階段),預計在2020年達成初始作戰能力(IOC),裝備於神盾與非神盾艦上。在2017年6月12日至13日,ESSM Block 2在加州外海穆谷角測試場海域進行首次飛行測試,稱為控制測試載具(Controlled Test Vehicle,CTV)飛行測試,共進行二次,編號分別為CVT-1和CVT-2,由美國海軍水面作戰研究中心(NSWC)的的防衛系統測試艦(SDTS)保羅.佛斯特號(USS Paul F. Foster EDD-964)發射。這兩次飛行測試主要測試ESSM Block 2的基本飛行性能與發射升空的安全性,都按照事先設定的軌跡飛行;其中,CVT-1模擬由垂直發射器發射(大角度飛行包絡),而CVT-2模擬由MK-29旋轉式發射器水平發射(低角度飛行包絡),兩次測試都完全成功。此後到ESSM Block 2正式投入量產前,還要進行四次實彈試射。
ESSM Block 2在2017年6月進行的控制測試載具(CTV)試射, 此為CTV-1測試的畫面,以垂直發射。 在2018年5月18日,雷松獲得美國海軍價值7700萬美元的合約,使ESSM Block 2從工程製造與發展(EMD)階段轉入低速初期量產(LRIP)階段。在2018年7月5日,北約海麻雀計畫辦公室(NSPO)宣布,日前成功進行ESSM Block 2的攔截飛行測試(由SDTS船保羅.佛斯特號發射),成功擊落一架BQM-74E靶機,這次試射是ESSM Block 2首次以新的主動雷達尋標器進行搜索與捕捉目標。在2019年,美國進行ESSM Block 2的最終測試;ESSM Block 2預定在2020年代起裝備於美國海軍。
(上與下二張)2018年7月初,ESSM Block 2從SDTS船保羅.佛斯特號上發射升空的畫面。 這是ESSM Block 2第一次實彈攔截測試,成功命中BQM-74E靶機。
GQM-163A郊狼(Coyote)超音速衝壓靶彈
2000年代開發的GQM-163A郊狼超音速衝壓靶彈 ,用來模擬各型超音速高空、掠海目標。
一枚發射的GQM-163A郊狼超音速衝壓靶彈 ,此時本體尚未與MK-70固態助升火箭分離。 在1980年代末,美國海軍研發AQM-127超音速低高度靶彈(Supersonic Low-Altitude Target,SLAT)來模擬蘇聯SS-N-22或法國當時研發中的ANS等超音速掠海反艦飛彈,但在1991年取消。此後,美國海軍繼續規劃超音速掠海標靶(Supersonic Sea-Skimming Target,SSST),以接替由除役的RIM-8護島神(Talos)防空飛彈改裝的MQM-8汪達爾(Vandal)靶彈。在1990年代末期,美國海軍評估波音與俄羅斯Zvezda-Strela的MA-31(由Zvezda 的Kh-31空射超音速反艦飛彈修改而來,Kh-31的北約代號是AS-17 Krypton),作為SSST完成之前的應急品,但最後評估認為MA-31整體性能不合要求,因此並未實行。 在2000年6月, 美國海軍與軌道科學機構(Orbital Sciences Corporation,OSC)簽署SSST的研發合約,稱為GQM-163A郊狼(Coyote)超音速衝壓靶彈 ,原計畫在2003年春季展開飛行測試,但由於遇到困難,直到2004年5月才完成首次飛行測試,2005年4月完成所有測試並開始生產。GQM-163A使用大西洋研究機構(Atlantic Research Corporation,ARC,後來成為Aerojet)開發的新型MARC-R-282可調整流量固態火箭衝壓續航發動機,並以一具Hercules的MK-70固態 助升火箭推進升空,導引控制系統由OSC與Raytheon聯合開發,以AQM-37D高空高速飛靶 (適合模擬高空、高速飛行並在末端大角度俯衝的目標,甚至可以模擬下落階段的短程彈道飛彈終端彈道)的系統為基礎。 為了節約成本,GQM-163使用許多美國海軍現有的組件,例如MK-70固態助升火箭係由已經除役的標準SM-1ER(RIM-67)防空飛彈的MK-12固態助升火箭加上一組MK-31尾部彈翼組而成,沿用標準SM-2 Block 2/3的電池,飛行控制系統以及前部構造則來自空射的AQM-37D靶彈。 GQM-163A本體長5.6m,含固態助升火箭的總長度約9.53m,彈體直徑35cm(含助升火箭46cm),重756.6kg~789.3kg,海平面的最大速度達2.8馬赫 (35000~60000英尺的高度為3到4馬赫),並能在6m以下的高度超音速掠海飛行( 通常為13到15英尺,3.96~4.57m),彈道終端在5m高度的速度約2.5馬赫,射程約60~90海里(111~167km,依照彈道而定),具有低-高-低等飛行模式,終端最大水平/垂直連續機動能力達15G(橫向10G,縱向5G),能有效模 擬終端掠海飛行並採取機動迴避的威脅-B(Threat-B)與威脅-C(Threat-C)目標。 GQM-163A在2005年投入服役,該年美國海軍也耗盡了所有的汪達爾靶彈 庫存。至2007年3月,OSC已經交付39枚GGM-163A靶彈(當時美國海軍總共訂購90枚),由位於穆古角(Point Mugu)的海軍防空作戰中心(Naval Air Warfare Center,NAWC)使用操作。 隨後,美國又針對GQM-163A展開名為高速俯衝(High Diver)的研改計畫,在原本的終端掠海攻擊模式之外,再增加一種高空高速巡航、彈道末端以陡峭角度俯衝攻擊目標的模式來模擬威脅-A(Threat-A)目標 ;在2010年7月,增加高速俯衝模式的GQM-163A進行飛行測試,達到200公里以上的飛行距離。 模擬超音速掠海飛彈(Threat-B/C)時,GQM-163A飛行高度介於13至66英尺之間(4~20m),飛行速率超過2馬赫;通常的飛行距離約45海里(83km),前35海里(約65km)以2.6馬赫速率維持約50英尺(15.2m)巡航高度,終端10海里(約18km)降至13英尺(約4m)並維持相同速率。模擬從高空俯衝的超音速目標(Threat-A)時,飛行高度達52000英尺(15850m),飛行速率3.8馬赫,然後以15至55度俯角俯衝,終端在1000英尺(305m)高度時速度介於0.7至3馬赫之間。GQM-163A最大飛行距離約119海里(220km)。 在2007年中,美國海軍啟動「多段超音速目標」(Multi-Stage Supersonic Target ,MSST)飛彈靶項目,研發一種用來模擬威脅-D(Threat-D)的靶彈,使用與俄羅斯SS-N-27俱樂部相似的次音速巡航、終端超音速掠海飛行模式 在2008年8月,美國海軍宣布大西洋科技系統(Alliant Techsystems,ATK) 贏得合約,以GQM-163A為基礎來研發MSST,型號為GMQ-173A,2008年合約在9月2日簽署(價值9700萬美元),研發階段預定在2012年10月結束。這份初始合約包括製造7枚原型彈進行試射,第一枚原型彈在2011年1月出廠,5月首次試射,測試工作一直持續到2012年底。 GMQ-173A MSST原訂在2014年開始服役,但研製過程中發生落後與超支,整個時程被迫向後推延;在2013年,MSST重新進行工程與製造發展(Engineering and Manufacturing Development,EMD)階段。MSST項目在2015財年追加了86.2萬美元預算。由於項目時程重新定義,MSST項目需要在2016財年繼續追加經費,並且將火箭發射超音速載具能力(rocket-launched supersonic capability)的端對端(end-to-end)測試項目訂在2018財年;在2016財年,美國國防部把4180萬美元從WPN (BLI 2280)轉移到MSST項目,繼續進行EMD工程。此外,2016財年又另外編列580萬美元給MSST項目來加速發展,並盡快進行火箭發射超音速載具能力測試。然而,MSST項目所屬的空中標靶系統發展(Aerial Target System Development,ATSD)在2016財年經費縮減3740萬美元。到2017財年起,MSST項目的經費完全從ATSD刪除,意味MSST遭到取消。
以GQM-163A為基礎發展的GMQ-173A MSST靶彈,用來模擬飛行次音速巡航、 終端超音速的Threat D威脅。但MSST項目發展不順利,在2017財年遭到取消。
除了新型超音速靶彈之外,美國隨後還招標新一代高次音速靶彈,由CEI的BQM-177得標。BQM-177長度5.18m,翼展2.13m,發射重量635kg,最大飛行速率1.1馬赫,飛行高度從6英尺(2m)到45000英尺(13716m),飛行機動負載為-2G~9G。BQM-177能依照不同的任務需求而攜帶不同的籌載模組,包括煙幕產生裝置、IFF敵我識別收發器、主動/被動雷達截面積放大裝置、電子反制裝置以及包含金屬干擾絲/熱焰彈在內的電子/紅外線反制裝置。 除了對付空中的威脅外,美國海軍隨後也研究ESSM在必要時攻擊水面/地面目標的能力;在2007年5月底,美國海軍與雷松公司保羅.佛斯特號(ex-USS Paul F. Foster,EDD-964,接替迪卡圖號的任務)武器測試艦上,測試以MK-57 Mod 12射控系統導引ESSM飛彈攻擊陸地目標。 依照2012年度美國海軍採購預算的資料,一枚ESSM飛彈的平均單價約 為138萬美元,而一枚GQM-163A靶彈則高達398萬美元。 依照2014財年資料,一枚RIM-162 ESSM的價格介於84萬美元至97萬美元之間(視構型不同);與MK-29飛彈發射系統相容的ESSM的全彈價格(All-Up Round)約84.19萬美元,而與MK-41垂直發射系統相容的ESSM的全彈價格約96.78萬美元。 雷松SL-AMRAAM-ER
雷松結合SL-AMRAAM系統架構與ESSM推進器而成的SL-AMRAAM-ER主動雷達導引 對空飛彈。ESSM Block 2也朝類似方向發展, 換裝與SM-6相似的主動/半主動 兼用雷達尋標器。 在2000年代後期,雷松公司與挪威康斯堡航太(Kongsberg)與Nammo公司進行一向自費的研發,以雷松既有的SL-AMRAAM主動雷達導引地對空飛彈(AIM-120先進中程空對空飛彈的地對空衍生型)為基礎,結合ESSM的後段推進器,成為增程型SL-AMRAAM(即SL-AMRAAM-ER)。為了配合ESSM直徑達10吋的推進器,SL-AMRAAM-ER前部彈體外型是逐步向外擴張(原本AMRAAM為7吋) ,與後部推進器的輪廓融合。相較於原本的SLAMRAAM,更換推進器的SLAMRAAM-ER可獲得更長的有效射程。在2009年5月2日在挪威的安多亞(Andoya)進行首次發射測試。挪威康斯堡航太先前曾以SL-AMRAAM為基礎,開發出挪威先進地對空飛彈系統(Norwegian Advanced Surface-to-Air Missile System,NASAMS),這是第一套完整實用化、系統化的SL-AMRAAM,擁有自己的雷達/射控 與地面發射系統。 雷松SL-AMRAAM-ER將有陸基與艦載版本(未來甚至可能有空對空版),除了瞄準現有SL-AMRAAM的使用客戶之外,還將市場對象鎖定一些對ESSM有興趣的非北約海麻雀集團成員國;這是因為所有海麻雀系列飛彈的出口都需經過所有北約海麻雀集團會員國同意,限制較多;而SL-AMRAAM-ER就沒有這層顧慮。 由於直徑與外部尺寸與ESSM相當,SL-AMRAAM-ER應可輕易整合於與ESSM相同(或相似)、配合MK-41垂直發射器的四合一發射容器內,對其拓展銷售將是一大賣點。
註:蘇聯Kh-31超音速衝壓反艦飛彈帳面上在高空最大飛行速率高達3.3馬赫,低空最大速率也高達2.7馬赫;但由於飛彈為了配合由軍機搭載而將重量控制在600kg級(美製空射型魚叉反艦飛彈重540kg),攜帶的燃料不足,大約燃燒28秒就會耗盡(Fuel Out),此後飛彈就再也沒有動力,只會一路減速。依照波音公司購買Kh-31駔為靶彈的測試,由戰鬥機掛載在中低空飛行(高度2000英尺,縮短敵艦雷達發現的時間)時發射,發射後飛彈一路下降到距離海平面約10m高度飛行;在衝壓發動機工作的近30秒內,飛彈的確會加速到2.5馬赫,然而燃料燃燒殆盡後,由於近海平面的大氣密度高、阻力大,大約在發射後40秒(燃料耗盡後10秒)就會下降到音速以下;飛彈放慢到次音速以後減速幅度減緩,在發射後70秒(飛行距離約20海里,約37km)下降到0.35馬赫,此時飛彈還有動能可以做10G左右的閃避動作,但末端速度已經大幅降低,再也發揮不出超音速反艦飛彈的穿透特長。即便發射機在高空飛行(33000呎)時發射,加上火箭延後點燃,飛行時間可以延長一倍,但射程也只多增加50%,終端速度也沒有提高。如果希望在飛彈能以超音速穿透目標防空網,發射距離就必須拉近到飛彈燃料耗盡之前,如此從33000英尺高空飛行發射的射程只有24海里(44.5km),如以2000英尺中低空發射,射程更會降到13海里(24km);這樣的射程早已進入區域防空艦的防空飛彈射程內,大幅增加發射機遭到攔截命中的機率。 |