協同接戰能力(CEC)/海軍整合射控防空項目 (NIFC-CA)
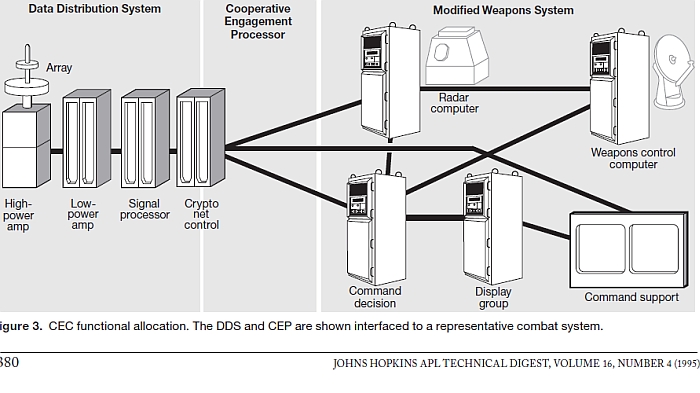
協同接戰能力(CEC)的功能硬體架構,系統中的兩個主要次系統是資料分配系統(DDS)以及
協同作戰處理系統(CEP)

美國海軍胡蜂級兩棲突擊艦基薩其奇(USS Kearsarge LHD-3)主桅杆頂安裝的天線組,圓錐狀天線是CEC的C波段
SBAA主動相位陣列傳輸天線。這是是第二代CEC (Baseline 2)的AN/USG-2艦載終端系統的一部份;日後更新版的
AN/USG-2又以技術更新
、更輕且廉價的平板陣列天線組(PAAA)取代SBAA。
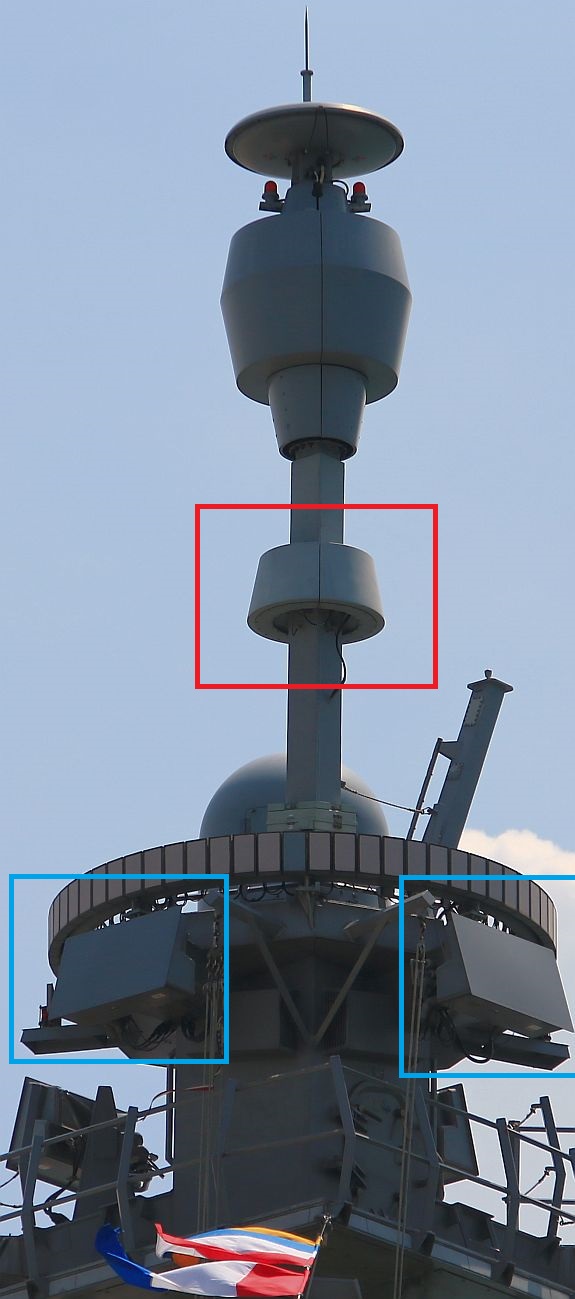
柏克級飛彈驅逐艦本福德號((USS Benfold DDG-65)主桅杆頂上的天線組,四個方形物體就是
協同接戰能力(CEC)的AN/USG-2艦載終端設備的傳輸天線組,稱為平板陣列天線組(PAAA)。
這是一種C波段主動相位陣列通信天線。

柏克級飛彈驅逐艦威廉.勞倫斯號(USS William P. Lawrence DDG-110)的主桅杆頂的平板陣列天線組
(PAAA)。攝於2019年5月新家坡國際海事防務展(IMDEX 2019)

柏克Flight 2A飛彈驅逐艦拉菲.強森號(USS Ralph Johnson DDG-114) 的主桅杆頂部。
桅杆上有多部平板陣列天線組(PAAA)。桅杆頂部有一個截收用的AS-4692 VHF/UHF錐形裂縫
天線陣列,為AN/SRS-1戰鬥測向系統(CDF)與SSEE船艦信號採集設備提供信息。,
攝於2023年10月13日橫須賀。
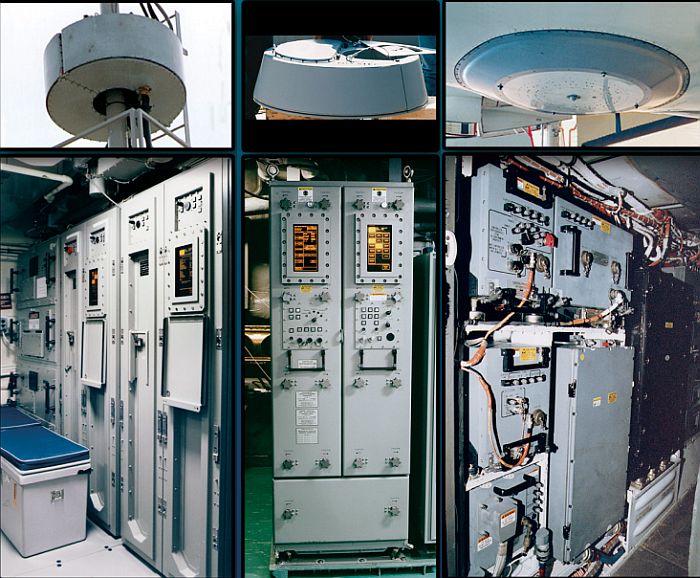
由左而又分別是幾代CEC的傳輸天線與後端設備:最左是CEC工程發展階段(Baseline 1)的AN/USG-1艦載設備,
採用圓柱狀 的被動相位陣列天線,後端有四個機櫃。居中是CEC第一種量產型(Baseline 2)的AN/USG-2艦載設備,
電子掃描傳輸天線
設置在機腹。注意畫面中AN/USG-2艦載設備的天線是較早期的SBAA圓錐狀主動相位陣列天線,爾後美國海軍又發展更為廉價輕便的PAAA平面陣列。
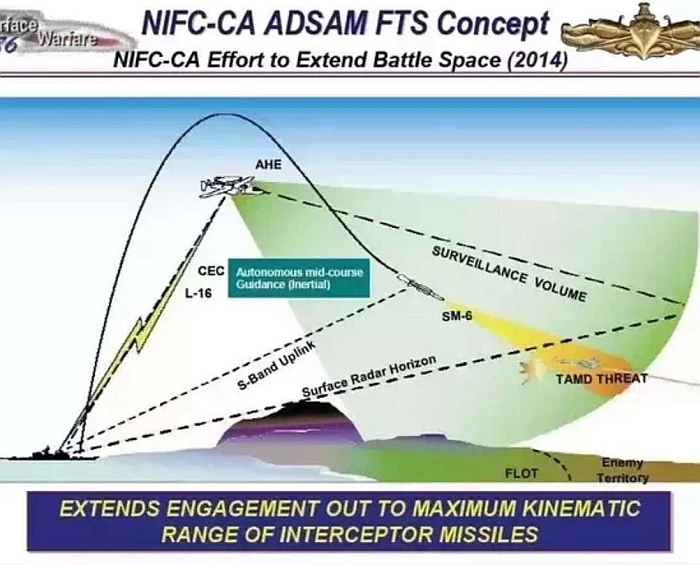
美國海軍在2014年的海軍整合射控防空項目(NIFC-CA)示意圖,透過CEC、Link16等作戰網路將
神盾艦、E-2D空中預警機以及戰鬥機結合在一起;例如,通過NIFC-CA,預警機等其他平台能
將探測資料中繼分享到被水平線或地形障礙後方的神盾艦,神盾艦以NIFC-CA提供的資料發射SM-6
防空飛彈升空,飛彈依靠其他連結NIFC-CA的平台持續提供的目標資料接近並獵殺目標,不需要
發射艦本身的雷達接觸。
──by Captain Picard
參考資料──
尖端科技雜誌218期:「現代戰場C3I的神經網路──戰術資料鏈」(張明德著)
全球防衛雜誌387期:「匿蹤+神盾=跨地平線防空傘─F-35B引導標六攔截超地平線目標」(Flak著)
APL:The Cooperative Engagement Capability(1995)
A Low-Cost Cooperative Engagement Capability Array Antenna by Craig R. Moore, Mark H. Luesse, and Kenneth W. O’Haver
|
起源 美國三軍在冷戰後期開始發展協同接戰能力(Cooperative Engagement Capability,CEC),這是一種高速、高頻寬的感測器聯網系統( Sensor Netting System) ,能匯集艦隊中多艘艦艇與預警機的雷達並一同運算處理形成高品質的單一戰場態勢圖像,並提供整合射控(Integrated Fire Control,IFC)能力,使不同的作戰節點(涵蓋海面船艦與空中飛機)實施多種類型的協同接戰作業;而這些協同探測與作戰能力都可以跨越地平線。隨著相關技術提升而使CEC實用化之後,不僅大幅提昇美國海軍的綜合戰力,並對未來美國海軍作戰方式造成深遠的影響。 在美蘇冷戰期間,美國海軍研究如何提高艦隊整體空域監視的品質,並且更有效地協調整個作戰編隊的防空接戰作業。個別船艦的雷達因為氣候、地形、海面產生的背景雜波以及敵方電子干擾,在某些情況下無法有效探測目標,這種情況在近岸作業時更為明顯;相較於開闊大洋中的敵我分明,靠近海岸時雷達一定會面臨沿岸地形的嚴重干擾,而且此區域通常有大量民間、第三方船隻與航空器,使敵我識別變得更加困難。當冷戰結束後,美國海軍主要作業範圍移到近岸,使這類問題更趨顯著。 由於一般三維雷達波束的水平向寬度較大,橫向的探測誤差遠大於縱向(徑向)誤差,因此單一雷達縱向測距比較準確,橫向方位探測誤差大得多;縱向誤差可透過脈衝壓縮處理技術來改善,但橫向受限於先天波束寬度而難以解決。如果能每艘船艦的系統能同時結合好幾部在不同位置的雷達的同一批「接觸資料」(雷達接收機從天線接收、還沒進行廣泛後處理的資料),統一進行運算處理,透過三角定位演算並過濾回波雜訊(等於是利用其他雷達精確的縱向測距,反過來推算目標相對於自身的橫向角度,比起自身雷達測定的橫向方位角度更精準),就可以獲得比單一雷達更精確的目標座標(方位、距離)資訊,而且有很高的機率排除掉單一雷達受雜訊干擾而產生的虛警;此外,單一雷達追蹤敵方空中目標回波時,可能因為天候、地形;海面產生的背景雜波或人為電子干擾而無法持續追蹤,但是結合多個在不同方位的雷達的資訊綜合處理之後,就可以整理成清晰而穩定的持續動態目標軌跡。而如果分享的不是雷達的原始「接觸資料」,只單純分享每艘船艦各自雷達後處理完的「目標軌跡」(Tracked data),多艘船艦都探測同一個目標時,由於平台定位時的誤差,再加上沒有良好的同步,很可能會誤認為是好幾個不同的目標,造成混亂。 而為了結合多部雷達的原始資料一同運算,必須有一種全新的數位資料傳輸設施,擁有遠比現有Link 11更大的頻寬,使得各艦上未處理過濾的雷達資訊能實時(Real Time)傳輸分享並一同處理。過去美國海軍NTDS艦載作戰系統雖然有Link 11高頻無線電(HF)資料鏈(工作波段為2 M~399.975 MHz)在各艦之間傳輸資料,但其頻寬有限(傳輸速率根據模式有1364/2250 bps,每秒最多傳輸約250個目標資訊,但是大型海空戰場需要同時追蹤2000個海中與空中目標),遠不足以實時(real time)傳輸多艘船艦之間未處理的雷達接觸資料。 由於雷達接收機直接接收的原始資料(raw data)過於龐大,因此不會直接送入CEC網路中。在CEC網路運作之下,每個節點會實時進行緊密聯繫,統一各節點的時間與空間座標,然後定時傳輸初步處理過濾的雷達原始資料;每個CEC節點後端根據每個網路內不同來源的雷達資料,進行數據融合處理。 早在1970年代初期,美國海軍就曾提出類似CEC的概念構想,並委託約翰.霍普金斯大學(Johns Hopkins University )應用物理實驗室(Applied Physcis Laboratory,APL)進行若干初步研究。然而由於CEC需要極大的頻寬與後端運算處理能力,當時的技術水平難以實現。 在1977年,美國啟動「戰鬥群防空協調」(Battle Group Anti-Air Warfare Coordination,BGAAWC)計畫 ,委由APL作為代理技術總監(Technical Direction Agent,TDA)負責主導整個計畫,研究如何結合當時即將問世的神盾(Aegis)作戰系統(使用SPY-1A相位陣列雷達)以及現有防空艦艇(使用SPS-48E三維雷達)來一起運作,進而強化整體艦隊防空;這項研究在日後導致CEC的誕生, 把分散在戰場的所有作戰節點(包括船艦、 預警機等載台)上不同性質的感測器的資料結合在一起即時處理並即時分享,使同一網路內的各節點能對整體戰場情勢有更完整與清晰的判斷。 在1985年,美國國防部正式提出CEC先期概念計畫,整個項目由美國海軍負責區域防空的計畫執行辦公室(Navy Program Executive Office for Theater Air Defense)主管,APL負責作為TDA,主導系統概念研究、關鍵技術開發、定義需求與介面、領導各CEC軟硬體組件測試(包含後來的大規模海上艦隊測試)。從1988年起,CEC進入實體工程研發階段,主承包為E系統(E-System,後來成為雷松C3I部門(Raythoen ECI Division)),在1989年進行陸上系統的概念展示。在1990年,兩艘提康德羅加級飛彈巡洋艦雷伊泰灣號(USS Leyte Gulf CG-55)與聖賈辛托號(USS San Jacinto CG-56)安裝了CEC系統原型設備,進行首次關鍵海上實驗(first critical at-sea experiment )。在當時,這些關於CEC概念驗證的船艦系統,使用額外安裝的商規電腦系統來執行主要的CEC相關軟體,作業系統為當時美國海軍正在推廣的商規Windows NT4.0。 CEC基本敘述 CEC包含三種主要能力,分別是複合追蹤與識別(Composite Tracking and Identification)、精確提示(Precision Cueing),以及協調多個節點的協同接戰(Coordinated Cooperative Engagements)。以下就分別簡介: 1.複合追蹤與識別
複合追蹤與識別示意,結合多個節點(船艦)雷達的資料成為 單一的精確完整戰場雷達圖像 複合追蹤與識別(Composite Tracking and Identification)是指CEC網路內每個節點分享各雷達的資料 ,然後由每個節點獨自追蹤處理同一批目標。CEC網路內各節點(包括船艦、預警機、陸地單位等)透過寬頻資料鏈,分享彼此之間的雷達探測資料(包括目標方位、高度、速度等 ,且尚未經過仔細處理和過濾)以及每個目標對應的MK-12敵我識別器(Mark XII Identification Friend or Foe,IFF)詢答結果;每個節點將來自所有其他節點的信息,自行處理融合成為整合雷達圖像。此種功能與美國許多艦艇上的SYS-2整合自動追蹤偵測系統(IADT)相似,但是SYS-2僅是將一艘艦艇上所有雷達的資料整合在一起 運算,而CEC則是 讓一艘船艦獲得艦隊內各艦艇的雷達資料來運算。因此,CEC需要讓不同位置與動態的節點進行遠距離時間、空間同步 ,每個節點要獨自融合來自所有節點的資料,而最後所有節點上各自融合產生的整合雷達圖像又必須達到同步,工程複雜度遠大於單一船艦上的IADT。 在CEC的複合追蹤概念之下,追蹤同一目標過程中,即便有一部份雷達暫時被遮蔽或離線,還能透過其他保持接觸的雷達繼續追蹤下去(但追蹤品質可能會下降);而單一節點平台本身的雷達即便離線,該節點的CEC系統仍能透過其他節點傳來的雷達資訊繼續保持追蹤。因此在邏輯上,每個CEC節點與節點本身的雷達是完全抽離的。
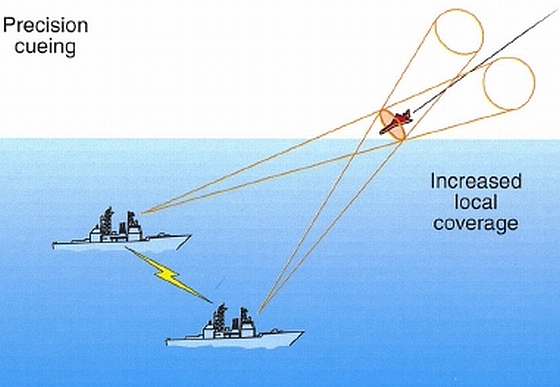
CEC通過結合每一部雷達距離精確度資料,經由比對每個雷達的相對位置 而得出雷達圖像,精確度遠高於單一雷達(方位精確度較低於距離精確度) 先天上,雷達的特性是距離精確度(Range accuracy)優於方位精確度(azimuth accuracy),因為雷達波束是一個扇面(鑑別度高的雷達波束較窄較筆直、波束角小,鑑別度較低的雷達則波束較寬、波束角大),距離越遠則雷達波正面的弧度(radian)越大,意味收到目標接觸時回波的方位誤差越大;然而目標距離則十分明確,因為電磁波行進速度恆定,只需要計算發射與接收到回波的時間差就能準確推算距離。而CEC結合多部位置不同的雷達對同一個目標的探測結果,利用每一部雷達較高的距離精卻度,修正各別雷達較差的方位精確度,再考慮各個雷達的相對位置計算出整合雷達圖像。由於結合多部位置不同的雷達的距離探測資料,通過演算法(如三角關係),CEC的整合雷達圖像的精確度可高於單一雷達的探測結果。 在CEC網路運作之下,每個節點會實時進行緊密聯繫,統一各節點的時間與空間座標(為此CEC各節點需要精準的時鐘,用來聯繫的高指向性波束使各節點完成定位,實現空間座標統一),然後各節點定時傳輸節點本身雷達獲得的資料(經過初步的同步處理、篩選)。 精確地統一各節點的時間、空間座標統之後,每個節點 的後端系統就能自行處理來自多個雷達的同一批接觸資料,用單一軟體產生目標軌跡,形成一個能完整描述艦隊周遭戰術態勢的「單一整合空中圖像」(Single Integrated Air Picture,SIAP),再透過一套演算法統合各節點產生的處理資料,使得每個節點的SIAP圖像達成一致。 此外,CEC節點的後端運算單元還可以設置複合識別準則(Composite Identification Doctrines),經由選擇的網路控制單元(Net Control Unit,NCU)的顯控台輸入,然後傳送至所有的CEC節點,成為接下來各節點運算時的共同處理準則;這些準則是針對一系列參數而設定的判斷邏輯,例如目標速度、目標位置相對於允許接戰空域的邊界、排除民航機的IFF詢答參數等等。 在處理融合各節點雷達資料時,每個節點提供的資料都有不同的權重與可信值等參數設定,這是依照各節點感測器雷達的精確度、物理特性等,然後依照CEC系統設定的某些概率閾值進行數據融合(包括刪除部分不可信數據)。 為了確保CEC網路產生的戰場單一圖像的品質,只有艦隊中最好的雷達資源能納入CEC網路的複合追蹤作業,主要是神盾艦上的相位陣列雷達、AN/SPS-48三維對空監視雷達、E-2C/D預警機上的長程預警雷達。2000年代初期美國海軍也曾打算把發展中的AN/SLY-2先進整合電子戰系統(Advanced Integrated Electronic Warfare,AIEWS)納入CEC網路(以往美國海軍的AN/SLQ-32電子戰系統的ESM精確度不符合CEC的要求),不過AIEWS在2002年遭到取消 。 由於CEC網路中每個船艦、飛機平台都在運動中,確認CEC網路中每一具雷達的正確位置座標,是CEC能否順利結合不同雷達進行共同運算的關鍵。CEC網路內各節點的定位工作由高指向性C波段資料鏈負責,工作原理應類似民航的二次雷達原理,透過資料鏈發射與應答,一來一往計算兩個節點的距離,並透過資料鏈天線波束指向、應答方主動回傳資訊(如該節點的GPS定位資訊)等方式確認方位,此外也可能包含電磁波三角定位演算法;這種機制不需要知道節點的絕對位置,因此 即便全球定位系統(GPS)失效也不會影響運算。 2.精確提示 透過複合追蹤能力 ,CEC網路內每個單一節點可以獲得本身感測器尚未接觸(可能由於距離較遠而沒有足夠強度的雷達回波)的目標方位先行處理,因此可以提前得知目標在空間中的哪個方位(稱為 目標獲得,Acquisition),用雷達對該處做小範圍、集中功率、長駐留(dwell)時間的精確探測,艦上的作戰射控系統也能提前展開作業;如果進一步獲得更清晰的目標接觸,透過CEC分享回饋給整個戰術網路,所有節點都能獲得該特定目標的更好接觸資料。而美國海軍將這種能力定義為精確提示(Precision Cueing)。 在CEC之前,單一作戰平台以自身感測器監視四週空域狀況長,稱為廣域搜索(volume search);為了確保沒有遺漏死角以及節省功率,廣域搜索模式的波束寬度都不會太小(意味能量分散、解析度降低 、虛警率提高),平時也不會以全功率輸出;為了讓寬角度、低能量密度的波束對目標回波有效響應,廣區域搜索模式也會降低雷達轉速,使得波束駐留在每一位置的時間相對延長。由於能量密度低,傳統旋轉雷達在廣區域搜索時,需要轉好幾圈、數次接收一個相同回波,才能確認有目標 接觸(而不是雜波虛警)並建立軌跡。戰鬥系統根據目標軌跡判斷敵意之後,對高威脅的目標建立射控等級的精確追蹤,然後啟動射控接戰程序;而如果提供指引的對空雷達精確度有限,接手的高精確度射控雷達(如X波段照射雷達)還要朝指引的空域範圍先進行搜索來捕捉目標。由以上可之,探測與接戰程序的每個環節過渡受限於雷達性能等因素,往往需要花費一些時間,這都減少了緊迫攔截任務中可用的反應時間。 另外,較大的船艦可能擁有多部不同的旋轉雷達來分攤廣區域搜索、近距離高密度追蹤以及射控等不同工作,而一些小型的船艦則可能需要一部多功能雷達來擔負廣域搜索與精確追蹤,然而兩種模式的特性先天就有抵觸,容易顧此失彼;例如,機械旋轉雷達從廣域搜索模式切換到針對特定扇區(甚至停駐)進行精確追蹤時,就無法同時兼顧其他空域的情況,此時如果有來自其他方位的威脅快速接近, 船艦將陷入險境;或者,旋轉雷達在精確追蹤模式會加快轉速來提高更新率、加快對迫近目標的反應,但在此模式下也使雷達波駐留在每個位置的時間減少,使探測距離降低,無法繼續兼顧廣區域搜索。雖然新型相位陣列雷達 具有集中的窄波束且能快速切換方向,不僅精確度大幅提高,從廣區域搜索接觸目標到建立精確追蹤的時間大幅加快,而且透過波束快速移動能同時保持廣區域搜索以及對多個目標精確追蹤,但當時通常只有某些高價值的主戰防空艦艇才配備這種雷達。 而有了CEC之後,各節點 能分享並融合不同雷達的資料,單一節點雷達就能根據CEC整合圖像的「精確提示」,集中波束資源朝特定方位警戒並準備接戰,同時間能仍透過CEC整合圖像獲得空域其他方位的態勢,讓每艘船艦都獲得品質更好且更全面的空域態勢圖像。在CEC的協調工作之下,一部份節點可以將旋轉雷達停駐在幾個威脅來襲的特定方位,而其他幾個節點雷達仍維持廣區域搜索。因此在CEC運作之下,幾艘使用旋轉雷達的艦艇聯合工作,也能獲得近似相位陣列雷達的探測效能。而如果CEC網路中有部分節點擁有相位陣列雷達之類的高品質感測器,整個網路中所有節點 都能分享到這樣的高品質探測資料。 CEC單一整合空中圖像的「精確提示」,讓各節點更快地得知自身雷達尚未確實接觸的目標方位,並即時採取局部精確搜索,最終減少了各節點 整個作戰過程中觀察-定位-決策-行動(OODA)流程所需的時間。研究與結果測試顯示,透過CEC網路進行複合追蹤識別以及精確提示目標來襲方向,節點本身的雷達可以直接針對特定扇區進行高功率集中掃描,因而能在更短的時間、更遠的距離下捕捉到目標,接戰程序也能提前啟動,大幅減少漏失目標的可能性,並增加成功攔截的機率。因此,透過分享與融合情資,CEC對整個作戰網路的偵測工作產生了明顯的加成效益。 在實際情境下, 許多次要艦艇(如兩棲艦艇、低檔護衛艦艇)只配備中短程的防空探測與防空自衛系統(例如點防禦防空飛彈),感測器從廣域搜索、對目標建立追蹤、判定敵意、獲得射控級精確資料、展開接戰程序到發射武器,整個流程要花費更長的時間 ,每個過程之間的轉換也會有更長的延遲;等到實際發射防空飛彈接戰時,敵方飛彈已經 迫近,防空攔截就變得「驚險無比」;萬一發射的第一枚防空飛彈失手,通常沒有機會進行第二次接戰(只剩下獨立的近迫防禦系統可以作為最後一道硬殺防線)。而有了CEC的精確提示之後,這些船艦可以提前 得知威脅信息(來襲方位、種類等等),艦上的作戰資源(感測器與武器)也可以提前朝來襲方位戒備,以在目標進入防空飛彈射程時就 立刻發射,真正發揮防空飛彈的最大有效射程,即便第一次攔截失敗也比較有第二次發射攔截的機會。 此外,複合追蹤能力能力對於抵抗干擾也頗有幫助。由於CEC節點結合各雷達資料融合運算時,會排除某些過於極端或較差的偵測資料;萬一某個節點遭受嚴重干擾,傳輸嚴重失真的資料(例如對於相同空間的偵測目標與其他節點的資料無法匹配),在資料融合過程中會遭到過濾排除,因此即便敵方對某個節點的方向實施電子干擾而降低了該節點的感測器效能,仍能透過CEC網路中其他不同位置的成員的各資料獲得彌補。
3.協同接戰
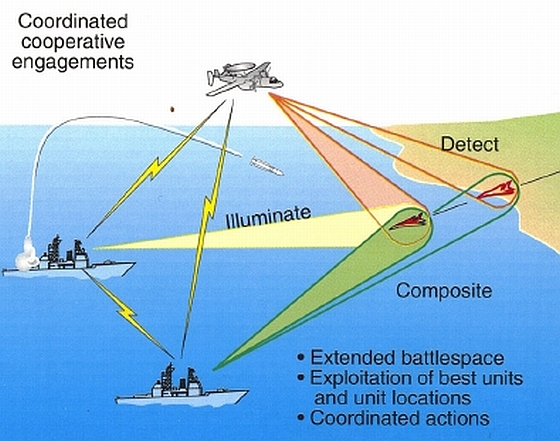
由多個探測與火控節點(例如船艦與預警機)進行的協同接戰 CEC網路提供低延遲的資料交換、高資料刷新率以及高精確度追蹤,而透過多個散佈在戰場上的節點能擴大整個網路的探測範圍,甚至延伸到個別節點的水平線以外;這意味著CEC可以讓節點取得本身 雷達尚無法接觸(例如距離太遙遠,或在水平面以下)的目標,並維持「標定」(Targeting)等級的高速資料更新 。以艦載標準SM-2防空飛彈而言,後來射程都延伸到超過100公里,然而單一船艦雷達的探測範圍受到地球曲率影響而受限,雷達無法探測到水平面以外的目標。而CEC就可以克服這樣的障礙,過去標準SM-2防空飛彈射控導引程序必須由發射艦全程負責,有了CEC網路可以在不同節點間交換射控等級資料後,飛彈射控接戰的幾個環節能由不同節點分工完成;如此,一艘船艦發射的區域防空飛彈,透過網路其他節點的協同作業,就可以攻擊發射艦本身探測範圍以外的目標,不同平台在接戰環節的分工也可視情況用有機、彈性的方式來協調。 由不同節點合力完成一件射控流程,就是協同接戰(Coordinated Cooperative Engagements),或稱為整合射控(Integrated Fire Control,IFC)。 整個防空飛彈接戰的各環節先後包括目標搜索(Object Observation)、精確追蹤與識別(Object Tracking & Identification)、射控級精確資料獲得(Fire Control Quality Data Attainment)、接戰起始(Engagement Initiation,根據威脅分析判斷到下達接戰決策、指派接戰的武器與支持射控的感測器等)、導引解算(Guidance Calculation)、接戰控制(Engagement Control,管理與監視接戰作業中所有需要的系統資源,包括感測器、射控級資料、通信傳輸的運作,以及檢驗射控資料等等)、導引中繼(Guidance Relay,在防空飛彈飛行途中與導引平台的上鏈資料更新與下鏈回報等通信交換)、終端照射(Target Illumination)等不同階段;藉由CEC的協同運算與資料交換,上述各階段的工作能視情況,由不同作戰平台(含預警機與船艦)分工並合力完成。CEC甚至還有自動接戰模式,由人員在網路控制單元(NCU)中輸入接戰準則,幾個節點組成的CEC網路就可以進行自動協同接戰。 整合射控(IFC)情境
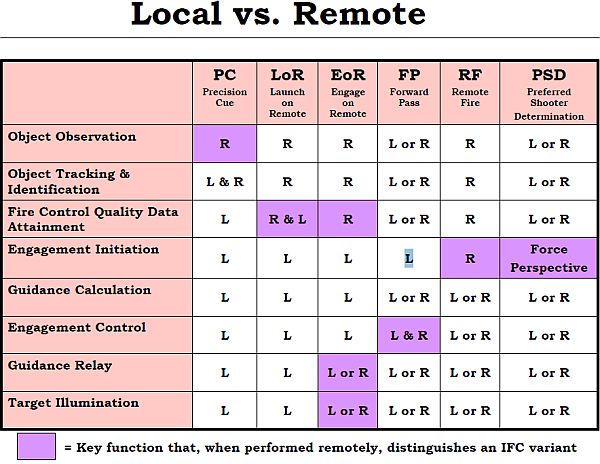
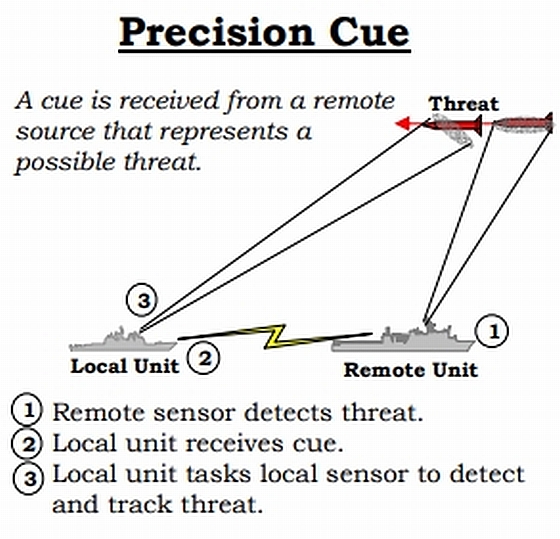
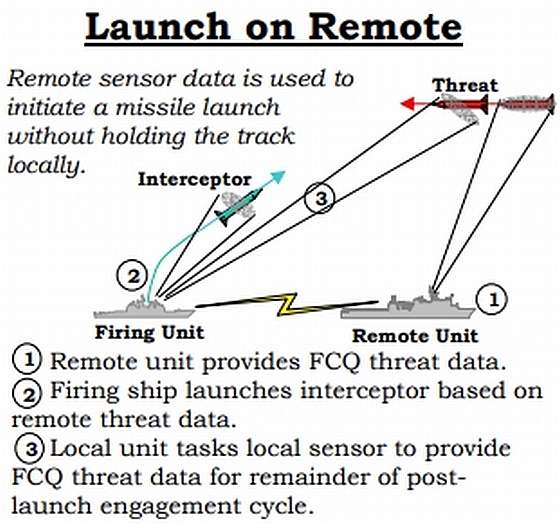
美國國防部對整合射控(IFC)有好幾種不同的定義。在不同的模式下, 每個射控環節由本地(local)或遠端(Remote)節點的分工都有不同選擇; 而CEC能力是實現整合射控的一大關鍵。 依照美國國防部的定義,整合射控(IFC)的情境包括前述的精確提示(Precision Cue,PC)、遠隔發射(Launch on Remote,LoR)、遠隔接戰(Engage on Remote,EoR)、前沿傳遞(Forward Pass,FP)、遠隔發射(Remote Fire,RF)以及由接戰人員決定(Preferred Shooter Determination,PSD)等六種,在這些情境之下,前述導引射控各階段工作的分工選擇都有不同;但無論何種模式,CEC是達成各種整合射控的關鍵條件,在CEC協同作業下,不同節點都擁有一個一致的高品質、大範圍實時戰場空域圖像,這是整合射控作業中分工的必要前提。 1.精確提示(PC):
堪稱最單純的接戰情境,是由遠端節點獲得目標搜索、精確追蹤識別資料,後續的接戰起始、控制、解算、發射與射控導引都由本地平台完成,這種情境相當於只配備短程自衛防空系統的船艦(航空母艦、兩棲艦等),透過CEC網路提前獲得目標方位與精確追蹤等提示,提前進行接戰作業,將本艦防空自衛系統的效能最大化。 2.由遠端發射(LoR):
由遠端(其他節點)的感測器發現目標並進行追蹤識別,將射控指引參數提供給發射艦,由發射艦靠自己的射控系統建立火控級目標資料、發射武器並完成後續制導接戰工作。與PC相較,LoR的遠端節點多進行了識別與追蹤,但後續整個射控接戰仍然由發射節點自己進行。 3.遠隔接戰(EoR):
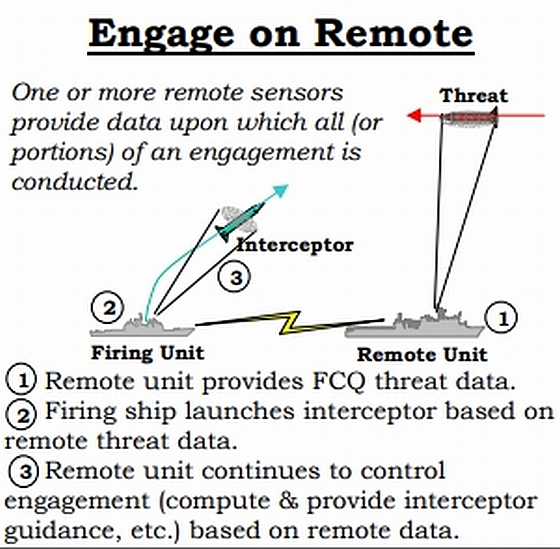
某節點透過CEC從遠端(其他節點)取得目標接觸與追蹤資料,由節點本身下達接戰決定、發射飛彈並自行負責飛彈飛行途中的接戰控制,但飛彈飛行途中所需的通信中繼以及終端照射也都是藉由遠方平台協助完成,如此本地節點就能在遠端節點協助下,接戰一個在水平線以外的目標。 4.前沿傳遞(FP):
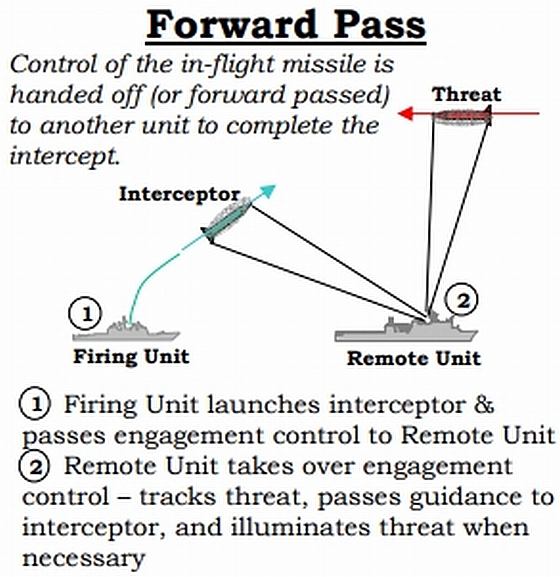
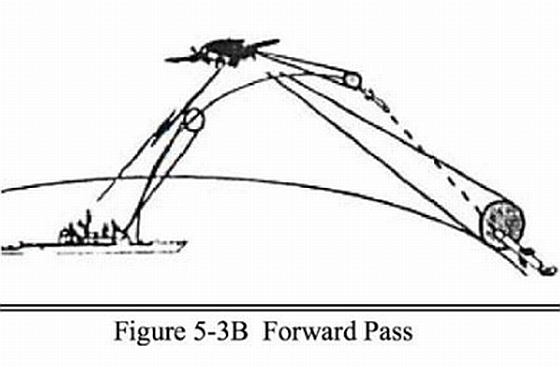
相較於遠隔接戰(EoR),前沿傳遞(FP)與遠隔發射(RF)在導引解算、接戰控制、導引中繼、終端照射等接戰環節有更廣泛的定義。例如,前延傳遞(FP)只有接戰起始(即判斷威脅與下達接戰決定)是由本地端之外,其餘環節都可由任意由本地或遠端提供,例如一個沒有火力的指揮節點(如預警機)根據CEC網路獲得的資料下達接戰決定,然後指派網路內其他成員進行後續的發射與導控作業,或者單一節點發射武器後將所有的射控導引支持工作轉移給其他節點。 5.遠隔發射(RF):
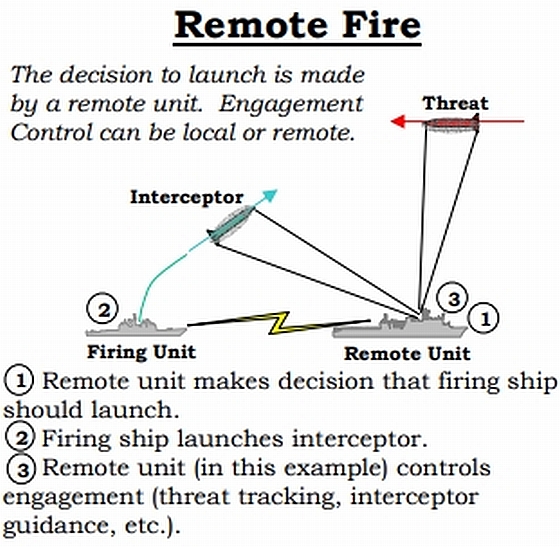
遠隔發射(RF)是本地節點配合其他作戰節點的分派,協助其他節點發起的飛彈接戰作業(目標偵測到接戰起始都已經由由其他節點完成),視情況在射控解算、接戰控制、導引中繼與終端照射等環節提供協助。 6.由接戰人員決定(PSD):
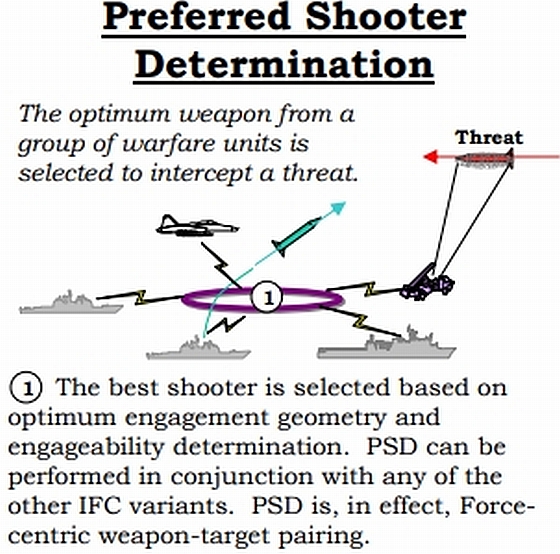
由接戰人員決定(PSD)是整合火控(FIC)的終極情境,前述的所有射控環節都可視戰場情況,任意選擇由本地或遠端平台進行,決定發射的節點本身不一定要自行探測追蹤目標,也不一定要擁有火力;美國海軍在2010年代基於CEC等現有戰術網路構築的整合射控防空項目(Naval Integrated Fire Control-Counter Air,NIFC-CA,見下文)就屬於這個層次,結合包含CEC在內的資源,形成一個完整的共同戰場態勢資料庫以及「遠隔接戰」支持平台,讓各種戰場上所有的成員(包含CEC節點與非CEC節點)隨時都能透過NIFC-CA取得目標資料,並根據情況從NIFC-CA網路中取得接戰所需的各種資源(包含火力、支持射控作業的所有資源與平台),指派一個接戰組合並進行接戰作業。除了海軍NIFC-CA之外,美國陸軍從2010年開始發展的整合防空與飛彈防禦戰場管理系統(Integrated Air and Missile Defense [IAMD] Battle Command System,IBCS)也是屬於PSD等級的整合射控系統,是一種隨插即用(plug-and-fight)的戰術網路,把戰區內所有雷達或防衛用感測器以及所有的火力單位(攔截器或作戰平台)整合起來;IBCS網路中的接戰作戰中心(Engagement Operations Center,EOC)負責接戰管理,依照需要自由指派網路中合適的感測器及火力單位來完成接戰任務,類似陸軍版的NIFC-CA;而網路中每個感測器與火力單位都靠著整合射控網路中繼(Integrated Fire Control Network Relay,IFCN Relay)來連上IBCS網路。 遠隔接戰能力能擴大整個CEC網路成員的作戰範圍,可以擺脫地平線造成的單一節點接戰限制,提高了先視先射的優勢,並擴大了接戰時的戰術靈活度(例如CEC網路內某節點可以有效追蹤目標但本身彈藥耗盡,另一個節點雖有武器但本身感測器無法探測到目標,就能用遠隔接戰能力遂行接戰)。當然,利用CEC實現遠隔接戰的基本條件是,CEC網路內至少要有一部達到射控精度的雷達,並且能對欲接戰的目標保持有效追蹤。 對於美國海軍而言,由於主要防空飛彈如標準SM-2、海麻雀系列等都採用半主動雷達終端導引,這使得進行「遠隔接戰」時,另一個接手導引的平台也必須擁有相對應的X波段照射能力,造成若干限制;然而,這個問題在2010年代引進終端主動雷達尋標器的SM-6與ESSM Block 2等防空飛彈出現後獲得了抒解。
CEC系統架構 由於傳輸資料的等級較傳統資料鏈大幅跨升,CEC的資料傳輸系統與過去的資料鏈路截然不同,而且有著更高的後端資料統整/處理需求。 CEC節點上部署的硬體稱為「 協同接戰傳輸處理組」(Cooperative Engagement Transmission Processing Set,CETPS),這是安裝於武器載台的終端設備。CETPS負責接收與處理來自於CEC網路內各不同作戰單位(含空中、水面、陸地等)傳輸的數位情資,透過真時(Real Time)的情資分享與處理,使CEC網路內的各成員協調出一個共同的戰術情資和射控態勢圖;此外,CEPTS還負責協同交戰決策與交戰執行,使一個CEC網路內各節點內所有的防空感測和武器系統能像一個在相同載台上的分散式系統搬工作。除了對各個CEC網路內部的情資分享與協調之外,CETPS還可在不同CEC網路之間分享與協調戰術態勢圖以及其他戰術情資,協調多個CEC戰鬥群進行網絡中心作戰。 CETPS分為 二個主要系統與五個次系統:兩個主要系統中第一是「資料分配系統」(Data Distribution System,DDS),第二則是「協同作戰處理系統」(Cooperative Engagement Processor,CEP),而另外五個子系統則分別為數據分配、指揮/顯示支援、感測器協同、交戰決策與交戰執行。 DDS負責CEC網路內各成員間的資料傳輸,有著極為嚴苛的性能要求,需兼具高有效輻射功率、足夠的頻寬與實實(real time)傳輸,必須能分辨30海里外與9公尺外的探測器所傳來的資料,傳輸速率5M bps以上,遠高於原有的Link 11/16 。DDS使用一組C波段相位陣列收發天線(這與以往的資料鏈路截然不同),以筆直狹窄波束 (與相位陣列雷達的波束相似)進行資料傳輸,故單一指向性高,不易被敵方截獲,且發射機使用高功率行波管;如同相位陣列雷達,此種筆狀窄波束功率較強 且指向性高,不僅不容易在其他方位洩漏旁瓣而使敵方察覺,也能靠著集中能量「燒穿」敵方干擾信號,故擁有出色的保密性與電子反反制能力。 CEP負責處理DDS傳輸來的 所有資訊,並透過VME資料匯流排與艦上戰鬥管理或者是各武器射控次系統連結,確保能即時獲得探測、火控的感測資料並進行融合處理。CEP處理來自不同節點的資訊時,包括座標轉換(消除各節點相對運動,使不同節點偵測的同一目標的座標資訊重合),並對不同節點的數據進行精確度加權和濾波 ;在此階段,受到嚴重干擾而使偵測資料嚴重失真的節點,其偵測數據將遭到排除。在1990年代APL進行CEC概念驗證階段,CEP的處理單元使用30個 商規Motorola 68040處理器,並以APL發展的獨特信息傳輸架構組成,安裝在加固機櫃中;每個處理器執行至少一項處理子功能,例如追蹤過濾(track filtering)、追蹤資料發散(divergence)與收斂(convergence )測試、目標閘鎖定(gridlock)、感測器介接(sensor interfacing)、協同接戰支援(cooperative engagement support)、資料分配介面(DDS interfacing)等等。CEC機制也包括用來步不同節點的時鐘機制,能將不同節點之間的處理同步到豪秒(ms)的等級。
CEC網路工作概觀 在1990年代APL研究與規劃CEC時,其網路的工作與通信基本如下: 要啟用CEC聯網時,操作人員在一個CEC節點的網路控制單元(NCU)下達「聯網起始」(net start)指令,這個CEC節點的DDS就開始搜索其他CEC節點的DDS;DDS之間建立溝通的方式類似敵我識別器(IFF)的詢答,首先透過陣列天線對周遭寬廣區域發出詢問(interrogations)。每個CEC節點的DDS單元陸續接收到其他DDS的詢問之後,以循序(reciprocal)方式依序回覆每個DDS的詢問。藉由各節點DDS的詢答,每個CEC節點由近而遠逐步確認身份並加入CEC網路;等到整個網路完成「聯網起始」程序後,每個CEC節點都會得知網路內所有節點的位置(無論水平線內節點間的直接聯繫,或透過其他節點、在水平線以外的間接聯繫)。在DDS高功率、高指向性的相位陣列天線傳輸之下,每個CEC節點隨時與其他節點保持同步與通信,分享彼此的位置資料,之間的通信波束都是高精確度、高頻寬且經過加密。一旦每個CEC節點都知道彼此位置,就可以進行目標閘鎖定對齊程序(gridlock alignment process),協同處理各節點分享的雷達資訊。 CEC網路開始工作之後,每個CEC節點透過DDS接收到其他節點的雷達資料,節點上的CEP就會透過DDS將資料轉發到其他節點;同時,本地的CEP閘鎖定(gridlocks ,將網路傳來的其他感測資料轉換到本身的座標),並將新資料整合到本地執行的目標追蹤程序(tracking process)中。如此,CEC節點本身的雷達後端處理系統就能引用CEC的資料,為本地雷達提供額外的先期提示。而與CEC協同接戰作業相關的網路控制狀態(Net control status)、準則(doctrine)、遠隔接戰狀態(remote engagement status)、本地端雷達活動查詢(local radar activity requests )等,通常都需要緊密地跟CEC節點本地單位的戰鬥管理、決策、武器射控系統互動,例如為某個節點本地的武器系統提供來自CEC的高更新率、高精確度射控雷達指引。另外,雖然CEC協同運算本身需要高頻寬的傳輸系統,但是每個CEC節點運算產出的整合追蹤資料(屬於track data)仍可透過Link 11、Link 16等一般的戰術資料鏈,分享給其他沒有參與CEC網路的作戰節點。 運作時,CEC節點需要全時間實時追蹤與同步網路內所有的節點,然後定期進行資料交換 ,資料交換的頻率是毫秒級(millisecond),也就是零點幾秒就能完成信息傳遞。在CEC網路工作時,網路中每個節點需要精確地統一時序,每個節點才能在透過廣泛頻寬(spread-spectrum)波形分享探測數據的情況下,在各節點上同步執行相同的獨立程序。在1990年代APL發展CEC時, 各節點的CEP使用銫原子鐘(cesium clock)來控制時間,透過豪秒級的DDS同步程序來維持每個節點的時序同步。 CEC網路的運作體制能自動適應節點數量的動態增減,能允許單一節點隨時加入或離開網路,這些過程不需要人工介入操作。一旦有節點突然離線,所有節點的DDS都會獲得通知,然後調整CEC網路的聯網與處理排程,其餘正常的節點就能繞過失效節點繼續保持工作;此外,一個已經在工作的CEC網路也能容納新加入的節點,透過DDS間的答詢程序完成加入。任何時刻,任一CEC節點都可以自動為網路中其他節點提供中繼轉發。 由於CEC的高度自動化,雖然與船艦上各項子系統密切互動,但並不需要設置任何專門的操作人員;甚至在CEC與現有艦載戰鬥系統整合測試之後,評估結果認為CEC整合感測資訊之後,能有效減輕現有各戰位操作人員的工作複合。操作人員對於CEC節點只有少數關於改變狀態的操作,包括啟動CEC(net start)、關閉CEC(net shutdown)、讓加入現有CEC網路(net entry),以及離開目前的CEC網路(terminal signoff),這些指令都是由人員在網路控制單元(NCU)下達,使得整個CEC網路知道單一CEC節點狀態的改變。另外,作戰人員也可以根據實際需要(並非必要),在NCU對CEC網路下達若干接戰準則( engagement doctrine),例如一些用來避免誤擊的設置。此外,艦上作戰系統的多數顯控台也能存取CEC運作的資訊,包括此時CEC網路中有哪些感測器在蒐集資料、追蹤歷史、可以選擇的準則等等。 在設計與驗證階段,APL也逐步完善CEC整合程序,已保證低虛警率的同時,能夠獲得高敏感、高精確的目標提示。例如,單一節點雷達如果產生虛警,通常意味該節點雷達雷達後端的閥值(容忍錯誤的設定)高於整個CEC網路的標準,因此每個節點的CEP雷達資料時也會將這項因素納入考慮。
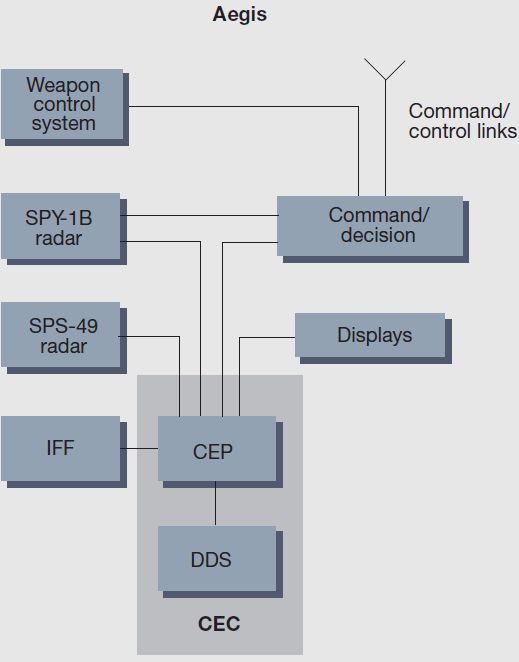
CEC與艦載戰鬥系統的整合 APL除了研發、定義CEC之外,也負責將CEC整合到現有艦載戰鬥系統的工作,包括定義各次系統介面等等;為此,APL也與美國海軍各個作戰系統主承包商如洛克西德.馬丁(Lockheed Martin)、休斯飛機(Hughes Aircraft)、ITT Gilfillan、諾斯洛普.格魯曼集團( Northrup/Grumman Corp)等。CEC與船艦本身作戰系統的整合工作依照每種作戰系統的結構、配套感測器性能等情況而定,使得CEC在確保聯網與工作的同時,也能為節點本地端的作戰系統帶來最大附帶效益。 1.與神盾系統整合:在CEC發展期間(1990年代初期),與神盾系統整合時,CEP與神盾系統的多個子系統分別以專屬的介面直接連結,包括AN/SPY-1B相位陣列雷達、SPS-49長程對空搜索雷達、指揮決策系統(C&D)、神盾顯示系統(ACD)以及敵我識別器(IFF)等。這是因為AN/SPY-1B相位陣列雷達是神盾系統的中樞感測器(直接與神盾的C&D連結),傳輸的資料量與刷新率遠高於其他美國海軍任何其他雷達系統;而當時神盾系統仍屬於半集中式架構,中樞的指揮決策系統(C&D)很難在沒有大幅修改的情況下,作為CEC的統一連結對口。基於當時計算機的能力,為了確保CEP能實時取得神盾系統如此龐大的資料量,AN/SPY-1B雷達系統必須直接與CEP整合。此外,在當時神盾巡洋艦上,SPS-49長程二維雷達屬於舊式的類比式系統(AN/SPY-1是軟體控制的數位化雷達),且被作為一種備份雷達,沒有直接與C&D整合,因此CEC也需要另外專門處理SPS-49的雷達資訊,與SPY-1雷達的資訊進行融合。在1990年代CEC研發測試時,神盾系統的武器控制系統(WCS)尚未與CEP直接連結,之後這個介面才逐步發展完善。隨著之後神盾系統日益演進(例如Baseline 7之後就過渡到分散式架構),加上相關硬體資料傳輸處理能力提升,日後CEC與神盾系統的整合工作應該會逐漸簡化;例如到了2010年代服役的神盾Baseline 9,配合NIFC-CA的架構,CEC與其他單一雷達(包括本身或來自其他平台)在邏輯上都是平行的物件。
在概念發展階段,CEC與神盾系統整合時,與神盾艦上多個子系統如 AN/SPY-1B相位陣列雷達、SPS-49長程對空搜索雷達、指揮決策系統( C&D)、神盾顯示系統(ACD)以及敵我識別器(IFF)等都分別以介面 與CEP直接連結,確保這些重要感測器的資料實時輸入CEC中。
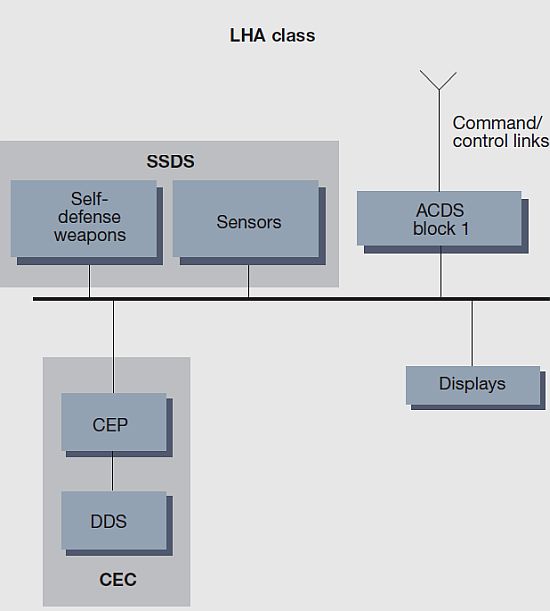
2.與SSDS、ACDS整合:1990年代美國海軍新開發的船艦自衛系統(Ship Self-Defense System,SSDS)以及先進作戰指揮系統(Advanced Combat Direction System,ACDS) Block 1(ACDS是基於原有的NTDS發展而來)與CEC整合,就直接以整個系統的方式,透過資料匯流排或區域網路(LAN)與CEP連結,而不像神盾系統的許多子系統都要直接連結CEP。SSDS一開始就引進分散式系統架構,與CEC的整合自然相對單純簡化;此外,裝備ACDS、SSDS的船艦(如航空母艦、兩棲作戰艦艇等,以及經過NTU升級的老一代非神盾防空艦)的雷達資料量遠低於AN/SPY-1相位陣列雷達,因此就沒有必要直接將雷達連結到CEP進行處理。
CEC與兩棲攻擊艦上的SSDS船艦自衛系統、ACDS作戰系統整合時,由於 SSDS已經引進分散式系統架構,CEC只需要透過傳輸介面與SSDS、 ACDS在系統層面上進行連結,而不像跟神盾系統整合時需直接與各主要 次系統直接連結。 APL發展CEC時,美國海軍正開始推動所有戰鬥系統使用共同族系(common genealogy)軟體,同一軟體只須要少量細部調整,就能用於不同的系統實作,如此可顯著降低軟體開發以及後續維護支持的成本。在1990年代前期,APL同時負責發展CEC以及船艦自衛系統(SSDS)的軟體,兩者超過50%的軟體是完全通用或近完全通用,包括與艦上雷達連結的介面、追蹤過濾等等。
CEC的設備版本 CEC的節點設備「 協同接戰傳輸處理組」(CETPS)分為艦載版與機載版二種,艦載版在工程發展階段時編號為AN/USG-1(CEC Baseline 1),正式服役的版本則為AN/USG-2(CEC Baseline 2)。機載版則為AN/USG-3,又稱為協同作戰空中通用裝備套件(CES),裝備於美國海軍的E-2C鷹眼(Hawkeye)空中預警機上。USG-1/2/3的SSD都使用C波段波束進行資料傳輸。
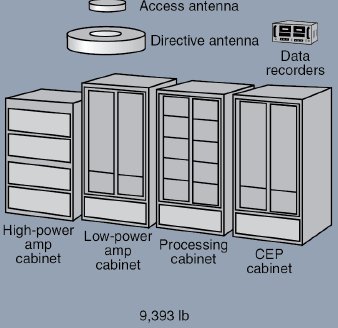
工程發展階段的CEC Baselne 1艦載設備,全系統重量達9393磅(4260kg),後端有四個機櫃。
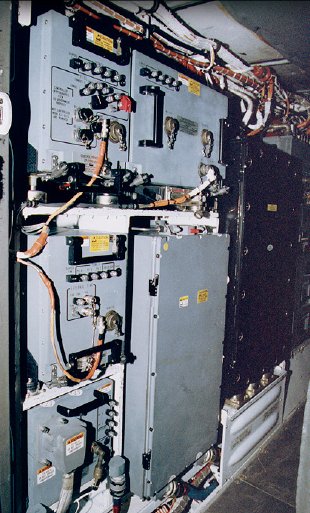
提康德羅加級巡洋艦聖喬治岬號(USS Cape St. George CG-71)在1994年安裝CEC Baseline1終端 設備(AN/USG-1) 的後端,可以看到四個機櫃。 第一代的AN/USG-1艦載終端全系統重量達9393磅(4260kg),採用被動相位陣列天線,後端有四個機櫃,包括與天線收發/信號處理相關的高功率放大器機櫃(High Power Amplify Cabinet)、低功率放大器(Low Power Amplify Cabinet)、信號處理機櫃(Signal Processing Cabinet),再加上協同作戰處理(CEP)機櫃。此外,還有一個一個資料紀錄器(Data recorders)。
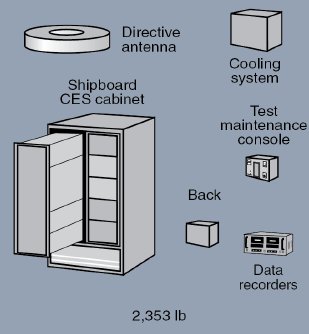
正式服役的CEC Baselne 2艦載設備,以主動相位陣列天線取代原有的被動 相位陣列天線系統, 省略下甲板發射機,後端處理機櫃也精減為一個, 全系統重量大幅減至2353磅(1067.3kg)
CEC Baselne 2只有一個後端機櫃,所有處理設備都集中在內。 第二代的AN/USG-2(V)由於使用許多更先進的硬體設備 ,例如固態主動相位陣列天線系統取代USG-1的被動相位陣列天線系統 ,因而省略了下甲板發射機;後端系統也因為電子技術進步而大幅精簡,例如新的專門應用IC技術(Application-specific integrated circuit technology)使電路組件數量減少一半以上,並引進新的商規Motorola Power PC處理器增加運算能力。AN/USG-2(V)的後端處理只須要一個機櫃,全系統重量大幅減至2353磅(1067.3kg)。
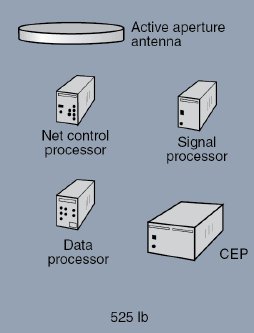
供E-2C空中預警機使用的機載CEC設備,全重量大幅降至525磅(238.13kg)。
CEC機載版的機櫃設備。
機載版CEC的EFA陣列天線。 機載的AN/USG-3的功能與艦載的USG-2大同小異,最主要的區別在於機載版本系統的體積、重量必須有嚴格限制,因為飛機的籌載能力遠不如艦艇。隨著微波積體電路(MMIC)技術日益成熟,主動相位陣列射頻天線到2000年代初期終於能滿足機載CEC設備高功率、輕量需求的需求。搭載於E-2C預警機上的USG-3的DDS使用一具位於機腹 、直徑1.37m的電子導引集端發射天線(名為停火陣列,End Fire Array,EFA,是一種使用微波積體電路的固態相位陣列收發組件),作為資料傳輸/中繼之用 。機載版AN/USG-3的前後端包括主動相位陣列天線、信號處理器(Signal processor)、資料處理器(Data processor)、網路控制處理器(Net control processor)以及CEP處理組。全系統重量只有525磅(238.13kg),從2000年起交機的E-2C鷹眼2000(Hawkeye 2000)便安裝了AN/USG-3。 此後,CEC系統還推出幾種不同的終端設備:AN/USG-4用於美國海軍陸戰隊(USMC)的CTN平台終端、AN/USG-5用於美國陸軍聯合陸攻巡航飛彈防禦聯網感測(Joint Land Attack Cruise Missile Defense Elevated Netted Sensor System,JLENS)平台,AN/USG-9則整合於美國海軍陸戰隊通用航空指揮管制系統(USMC Common Aviation Command and Control System)。之後美國開始透過海外軍售管道(FMS)向盟國出口CEC則使用包括AN/USG-6、7、8、10等編號。 傳輸天線 CEC的DDS的傳輸天線是一項關鍵基礎設備。 由於CEC需要傳輸比以往更大量的感測器探測資料,因此光是資料傳輸/處理的基礎硬體要求就遠遠超過任何既有的數位資料鏈。CEC的先決技術基礎包括傳輸交換資料量大的高頻寬數位資料鏈,以及將各節點資料做融合處理的強大運算能力。美國在CEC早期概念演示階段時,曾於1995年測試以Link-16資料鏈 (根據模式有31.6K、57.6K、115.2K bps等傳輸速率)作為CEC傳輸的可行性,實驗結果顯示目標更新速率、傳輸和融合後的資料精確度都不符合要求,每個CEC網路的成員數也極其有限,顯示CEC需要全新的資料傳輸硬體。
提康德羅加級巡洋艦聖喬治岬號(USS Cape St. George CG-71)在1994年安裝CEC Baseline1終端設備(AN/USG-1) ,採用圓柱狀的被動相位陣列傳輸天線, 真空管發射機位於下甲板。 CEC傳輸天線下方是一個盾狀檔板,與畫面下方 的LAMPS反潛直昇機資料鏈天線隔開。
CEC Baseline1的圓柱狀被動相位陣列天線工程發展階段的CEC Baseline 1的AN/USG-1終端設備的收發天線從1980年代後期開始發展,並在1990年代初逐步改進,使用圓柱狀的C波段被動相位陣列收發天線,安裝在主桅杆頂部;此種圓柱狀天線陣列,直徑44吋(111.76cm)、高14吋(35.56cm),由1000個輻射單元構成,每個單元包括正內在負二極管(positive intrinsic negative diode)技術的相移器,而天線射頻能量由位於下甲板的真空管發射機提供。CEC Baseline 1在1996年達到初始作戰能力(IOC)時,AN/USG-1就是採用這種收發天線。
(上與下)CEC Baseline1的SBAA主動相位陣列天線原型設備
隨後在1990年代中期,APL發展名為艦載主動孔徑(Shipboard Active Aperture,SBAA)的主動相位陣列天線,作為量產版本的CEC Baseline 2終端設備(AN/USG-2)的傳輸天線,取代了第一代系統的被動相位陣列天線系統;SBAA的天線陣列由許多收/發(T/R)模組 構成,天線上的T/R單元本身就有發射能力,因此就省略了第一代被動相位陣列天線系統的下甲板發射機。SBAA天線陣列外觀為圓錐狀,天線陣面T/R模組以砷化鎵(Gallium Arsenide, GaAs)半導體單晶片微波積體電路(Monolithic Microwave Integrated Circuit,MMIC) 技術來製作。由於省略第一代系統的真空管發射機等許多下甲板設備,SBAA主動相位陣列天線系統重量減輕了4000磅。CEC Baseline 2的AN/USG-2終端設備(含SBAA天線)在1997年通過初始作戰測試評估(initial operational test and evaluation),在2001年通過作戰評估(operational evaluation),隨後進入初期小批量生產(Low-Rate Initial Production,LRIP)。因此,SBAA成為美國海軍使用的第一種艦載固態主動相位陣列射頻系統。
美國海軍柏克級飛彈驅逐艦威廉.勞倫斯號(USS William P. Lawrence DDG-110)的主桅杆頂,,紅框處是聯合作戰資料系統(JTIDS)的 link 16傳輸天線,而藍框標示處則是平板陣列天線組(PAAA)。SBAA天線上方是AS-4692 VHF/UHF錐形裂縫天線陣列,屬於AN/SRS-1戰鬥測向系統(CDF)。
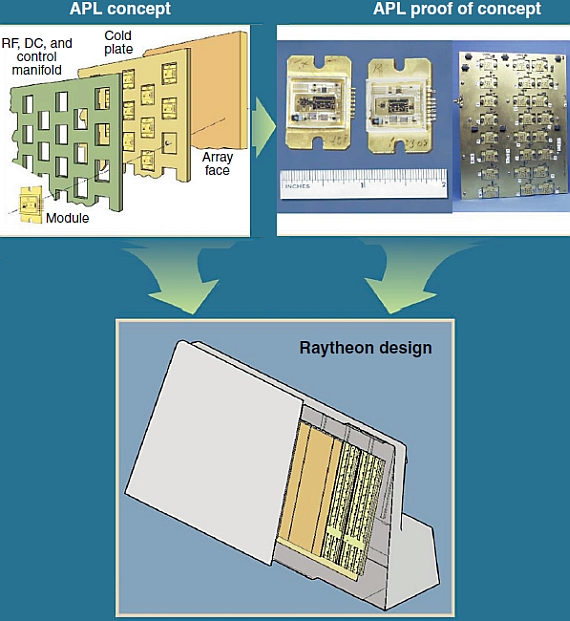
雖然實際操作經驗顯示SBAA天線的性能與可靠度都十分良好,然而價格卻嫌昂貴;如果接下來美國海軍所有柏克Flight 2/2A飛彈驅逐艦都要加裝的話,整體購置與壽期維護成本將十分可觀。因此,APL在1998年開始研究如何降低SBAA天線系統的整體成本。在1998年的初期研究中,APL打算開發一種採用四個平面陣列天線版本的SBAA(取代原先的圓錐狀天線陣列),希望能減低製造與安裝成本;然而,評估顯示光是這樣的變更,仍無法滿足美國海軍的成本要求。因此,APL航空系統部門(Air Defense Systems Department )另外展開了一項新的CEC低成本平面陣列天線(Low Cost Planner Array,LCPA)研究,利用更新的商規MMIC技術設計一種新的系統架構;除了使艦載版CEC設備更輕便、更低廉之外,輕量化也是讓CEC機載版終端設備實用化的必要條件。 在這項低成本平面陣列(LCPA)研究中,一大重點就是在成本與性能之間取得最佳的平衡;主動天線陣列的有效輻射功率(Effective Radiated Power,ERP)大致上與單元模組發射功率(Pm)成正比,而與發射組件數量的平方成正比。因此,以較低的成本充分滿足戰術性能的需求,是LCPA研究追求的目標。因此,以較低的成本充分滿足戰術性能的需求,是LCPA研究追求的目標。相關的研究結論顯示,以CEC的通訊需求,假設前端能量損耗(front-end losses)能控制在一個設定數值,則天線陣列上每個發射單元(T模組)的功率約為1~2W為佳;低功率的T/R模組製造成本的確較為低廉,但如果T/R組件的發射功率低於1W,為了滿足CEC要求的最終ERP功率,所需的T/R單元數量和天線結構尺寸會顯著增加,整體價格反而開始攀升。相對於軍用雷達,LCPA天線T/R模組所需的功率較低,因此能使用相對廉價的工程方案與組件。 經過研究之後,APL為CEC的LCPA天線陣列系統由四個平面相位陣列天線組成,取代了原本SBAA的圓柱狀陣列,每個陣面由若干個直線排列的線性可抽換模組(Line Replaceable Unit,LRU )構成。LRU是構成單一天線的基本單元,此一硬體稱為次陣列結構磚(Subarray Architecture Tile);每個LRU封裝了若干數量的T/R組件以及必要的輔助電路、元件以及散熱冷板等,能輕易更換且可靠度高。拜1990年代末期到2000年代初期商業電子技術的快速進步,使得CEC收發天線所需的單晶片微波積體電路(MMIC)成本迅速降低,這是LCPA能滿足美國海軍成本控制目標的關鍵因素。此時期民間手機技術進展快速,手機內的通信傳輸組件就是MMIC,在軍事上射頻領域的應用也因而受惠。LCPA的T/R模組的接收端包括相移器(phaseshifter)MMIC、一個後放大器(postamplifier)MMIC,以及一個低聲噪放大器(Low Noise Amplifier,LNA);而發射端模組包括一個相移器MMIC、一個驅動放大器(driver amplifier)MMIC以及一個功率相移器(phase-shifter)MMIC。每個T/R模組都有一個移相與儲存暫存器(shift-and-store register),是一般的矽IC晶片組件,將序列(serial )資料轉為平行(parallel)資料,負責控制相移器的設定以及開/關動作。LCPA每個T/R組件的發射功率,比先前SBAA更低,降低了每個T/R模組的成本。
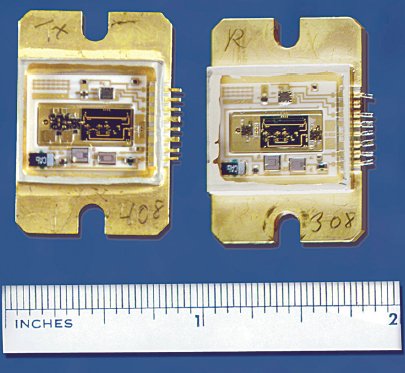
APL在LCPA天線概念研究階段生產的MMIC收發(T/R)組件,左為發射 (Transmit)晶片,右為接收(Receive)晶片。T/R組件是構成LCPA陣面的 基本輻射單元。
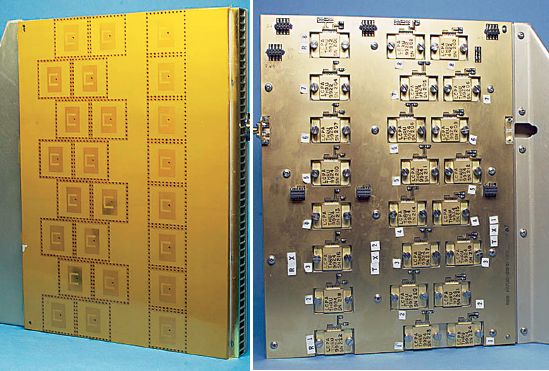
APL製作的LCPA概念展示天線組件的機板,左圖為正面,右圖為背面; 每個方框就是一個T/R組件的安裝位置
APL製作的LCPA概念展示用天線孔徑排列,最上方是由八個接收單元 (R模組)構成的線性陣列,下方則有16個發射組件(中間的8個是主動發射 組件)。
APL為CEC設計的LCPA天線的最初結構(左上)、原型硬體(右上)到 最後承包商雷松生產的實際產品(下) 拜商規MMIC技術進步成熟之賜,以往美國國防部使用的單一T/R組件(例如CEC先前使用的SBAA天線)成本可能高達1000甚至10000美元;而到APL研製LCPA時,由於技術進步且要求的功率相對較低,每個T/R組件的發射模組(面積11.5平方豪米)成本估計僅28.75美元,每個接收模組(面積8.5平方豪米)估計為21.25美元;此外,負責儲存與控制的矽IC組件每個估計為3.25美元,模組封裝基板的成本為12美元;而其餘跟發射模組有關的零組件成本為6美元,與接收模組相關的零組件成本約8美元。因此,整個T/R模組的成本大約只有80美元。初步估計,APL發展LCPA天線系統來取代原本的SBAA天線,美國海軍光是採購艦載CEC設備就可以節省約6億美元。
美國提康德羅加級飛彈巡洋艦安提坦號(USS Antietam CG-54)在2010年代初 完成改良作業所加裝的CEC平板陣列天線組(PAAA)。PAAA源於2000年代 初期推出的低成本平面陣列(LCPA),是美國海軍為CEC發展的第三種 艦載傳輸天線組。
依照美國海軍CEC項目主管辦公室(CEC Program Office) PMS 465的資料,APL在1998年秋季將LCPA的概念轉移給作為CEC設計代理(Design Agent)的雷松(Raytheon)公司;隨後雷松就以LCPA為基礎,發展正式的CEC平板陣列天線組(Planar Array Antenna Assembly,PAAA),從2003年起安裝在水面艦上;而APL仍持續與美國海軍和承包商密切合作,繼續進行平板陣列天線的發展與系統整合。除了第一線作戰艦艇(如柏克級)使用的四面平面陣列之外,雷松還發展出供部分單一桅杆艦艇使用的圓柱狀LCPA陣列,天線由技術相同的LRU單元構成。 在2010年代,美國為CEC開發新的通用陣列組件(Common Array Block,CAB),屬於IWS-7先進發展計畫,以氮化鎵(GaN)主動射頻積體電路(MMIC)技術的T/R組件取代原本PAAA的砷化鎵半導體T/R組件。GaN技術的相位陣列天線具備傳輸功率更高、性能與可靠度更好、成本更低等優勢。CAB最早的版本是供海軍陸戰隊車輛使用的CAB-E(E為遠征部隊),第二種為CAB-S艦載版,2010年代重啟建造的伯克級飛彈驅逐艦從DDG-118起預計以CAB-S取代原本的PAAA。 CEC的限制與難題 乍看之下,CEC似乎功能強大,但本身工程挑戰就很巨大,此外還有若干難以超越的限制。CEC需同時與多個高度、速度截然不同且差距甚大的單位(從靜止的地面單位到高空、高速飛行的飛機 )進行高更新率、高頻寬、高指向性資料傳輸;每個CEC節點的資料處理端需同時處理所有節點傳來的雷達資料進行處理,不同節點各自運算的結果還需要達成一致(CEC機制中並沒有一個用來協調各節點的特殊節點,完全是分散式架構)。要達成以上需求,除了需要專門的高指向/高頻寬傳輸基礎建設之外,後處理端還要很高的計算處理能量,軟體需精良完善的演算與整合管理機制,這些都是艱鉅的技術難題。 CEC有一些屬先天性的限制,例如為了提高傳輸 頻寬而使用波長較短的C波段,不像過去採用HF的Link 11具有跨地平線傳輸能力,需要透過空中的平台(例如E-2C預警機)來中繼。此外,CEC由於波束指向性高,各載台在連線時需要掌握彼此之間的相對位置,且傳輸陣列需要有自動的角鎖定功能,根據連線期間各個載台之間的相對動態來調整波束指向。
CEC最早能實現機載的終端CETPS原型以及天線陣列使用的T/R組件, 當時系統總重達3000磅,無法由E-2C預警機搭載,最早是安裝在一架 陸基的P-3B空中預警機上 CEC碰到的技術難題中,最明顯且最迫切需要解決的,是機載版CEC裝備的體積重量問題;這些硬體設備中,又以傳輸用相位陣列天線是最難輕量、縮小化的部位。以E-2C的籌載能力而言,終端設備總重最好低於227kg,而CETPS的 最早期原型設備重量高達9000磅(4092kg以上);1994年起安裝在P-3B預警機上的測試版本首度使用單晶片(Monolithic)微波積體電路(MicroWave Integrated Circuit,MMIC)收/發組件,光這一項改進就使全系統重量減少4000磅,雖然如此整個裝置的重量也仍有3000磅(1360kg),這樣的設備完全不可能裝在E-2C上。到了2000年代初期,機載版的USG-3的重量還是只減到683磅(310kg)左右,勉強安裝在E-2C上,而主承包商雷松公司仍繼續為USG-3減重 ,之後又降到518磅(235kg)。 除了機載版本的重量問題外,由於CEC傳輸頻寬與更新速率甚高,傳輸速率以Mbps計,代價就是網路內能容納的成員較少──早期CEC網路內最多僅能容納24個成員 ,就是由於頻寬的制約。不過上述技術性難題都可藉由技術不斷的進步而獲得改善,例如增加處理器運算速度在現代並非太大問題,而體積/重量的減少(其中還是以陣列天線的問題最大)也將隨著科技進步而得以逐漸實現 。同時,改進後端軟體與作業模式,盡量減少節點間不必要的資料傳輸,或者以更新的時間、空間同步策略來降低一些用來協調的傳輸量,也可以提高CEC網路的運作效率並節約頻寬。
美國聯合戰區空中與飛彈防禦辦公室(Joint Theater Air and Missile Defense
Office)基於CEC的經驗,提出聯合複合追蹤網路(Joint Composite Tracking
Network,JCTN)研究項目,研究跨戰區的感測器連網與整合射控;這項研究又衍生出兩個基於擴充CEC網路規模的研究,分別是JSN與TCN。JSN是針對不同的CEC網路之間進行資料交換,每個CEC內部仍維持原本的傳輸機制(即時交換所有未經處理的感測器資料),而兩個CEC集團之間則依靠Link-16資料鏈傳輸整合完成的單一整合空中圖像(這是是經過濾波的資料,資料量小得多,能透過一般的數位資料鏈傳輸),並以精確提示(Precision
Cueing)功能來互補兩個CEC網路各自沒有偵測到的部分。JSN機制的好處是系統架構較為簡單,並且維持原有的CEC網路內部傳輸體制,不過分屬不同CEC網路的成員不能直接交換整合空中圖像情資。而TCN則是針對CEC網路內部的資料傳輸機制進行改進,
在節點傳輸資料之前先進行資料選擇(data
select)機制,判斷每個節點相對欠缺哪些資訊,因此每個節點只在需要資料時才進行「接觸」(engegement)並傳輸雷達探測資料,如此就能節省不必要的傳寬,
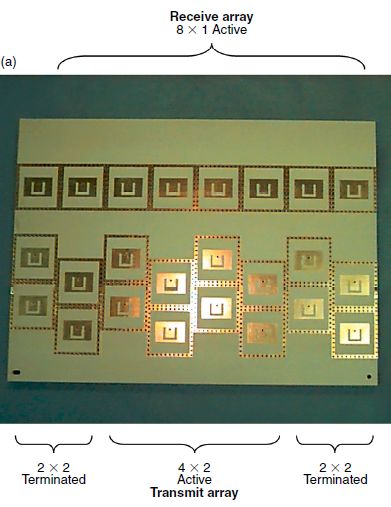
使CEC網路能容納更多節點 。 CEC的發展 與測試歷程 在1992年,CEC正式從原本的概念研究階段,轉為美國海軍正式採辦項目(Navy acquisition program)。 在1993年9月,CEC系統部署在經過新戰場威脅(New Threat Upgrade,NTU)升級的紀德號(USS Kidd DDG-993)飛彈驅逐艦上進行發展測試(Development Testing,DT)。發展測試的目標包括三項: 1.展示各項單元能共同運作,根據本地與遠端雷達和IFF資訊,形成一個清晰詳細的複合追蹤與識別圖像(composite track and identification picture)來提高態勢感知意識(situation awareness)。 2.驗證CEC的資料的精確度與刷新率足以支持協同檢查精確提示( coordinated prosecution of precision-cued)以及協同接戰(cooperative engagements),以提高個別分立系統的表現。 3.在模擬未來巡航飛彈威脅、充滿電子干擾的戰場環境下,仍能展現前述CEC項目的能力,顯著提高艦隊的防衛與生存能力。 在發展測試中,紀德號在近岸環境下,與部署在靠近諾福克(Norfolk, Virginia)基地的艦隊作戰指揮支援處( Fleet Combat Direction Support Site)的CEC節點進行協同傳輸作業。 在1994年,CEC正式對外公開。 CEC Baseline 1發展測試/作戰測試(DT/OT)階段 CEC在1994到1995年的測試涵蓋發展測試第二階段A(Development Testing,DT-IIA)以及作戰測試第一階段(Operational Testing,OT-1)等,其中DT-IIA是針對CEC系統的設計與表現評估,OT-1則是針對整個艦隊作戰行動的表現評估。 到了1994年4月,尼米茲級 航空母艦艾森豪號(USS Eisenhower CVN-69)領軍的航母戰鬥群各艦艇都安裝了USG-2 Baseline1版本的CEC工程發展版本設備,包括艾森豪號、提康德羅加級的安齊奧號(USS Anzio CG-68)與聖喬治岬號(USS Cape St. George CG-71),再加上先前已經進行發展測試(DT)的紀德號(USS Kidd DDG-993)飛彈驅逐艦,以及胡蜂級兩棲突擊艦的胡蜂號(USS Wasp LHD-1)等五艘船艦;胡蜂號是在美國國會指定下,部署當時正在開發的船艦自衛系統(SSDS)並結合CEC進行測試。此外,美國國會也指定一架屬於海關的岸基P-3B AEW預警機(搭載與E-2C預警機相同的APS-138雷達)加裝CEC機載傳輸端,參與這項整合測試;當時CEC機載系統的體積重量仍然過大,而且尚未與機載雷達完成整合,因此這架參與測試的P-3B主要充當中繼傳輸站。 這是美國海軍首次動用一整個航母戰鬥群編隊進行一項測試 在1994年初期,這支配備CEC的航母戰鬥群與P-3B預警機在諾福克近海的維吉尼亞角(Virginia Capes,VACAPES) 進行非作戰性的CEC基本能力測試,完成驗證的項目包括: 1.驗證每個CEC節點都能根據共享的雷達情資,各自獨立產生相同的複合追蹤與複合追蹤與識別圖像(composite track and identification picture)。這項測試是在民間航空交通密集繁忙、且有相當數量軍事航空機活動(來自航空母艦或陸地空軍基地)的美國東部外海,同時依照情況施予嚴重的電子反制措施(Electronic CounterMeasures,ECM)如欺騙式雷達干擾等等,而這支戰鬥群的CEC網路展現能在電子干擾環境下繼續追蹤空中目標。 2.驗證在複雜的電磁環境中(包含刻意施予的強烈電子干擾),CEC的DDS系統能夠自動而可靠地維持各項網路傳輸活動;這些聯網活動包含起始聯網(net start)、各單元加入網路(unit net entry)、在電子干擾之下進行各節點起始時間同步( initial time sync in jamming)、直接尋獲新聯網單元( directed acquisition of new units)、CEC網路擴張後自動擴展新的連結路徑(automatic addition of new connectivity paths )、部分節點斷線後自動重組連線路徑(rerouting around lost paths)。
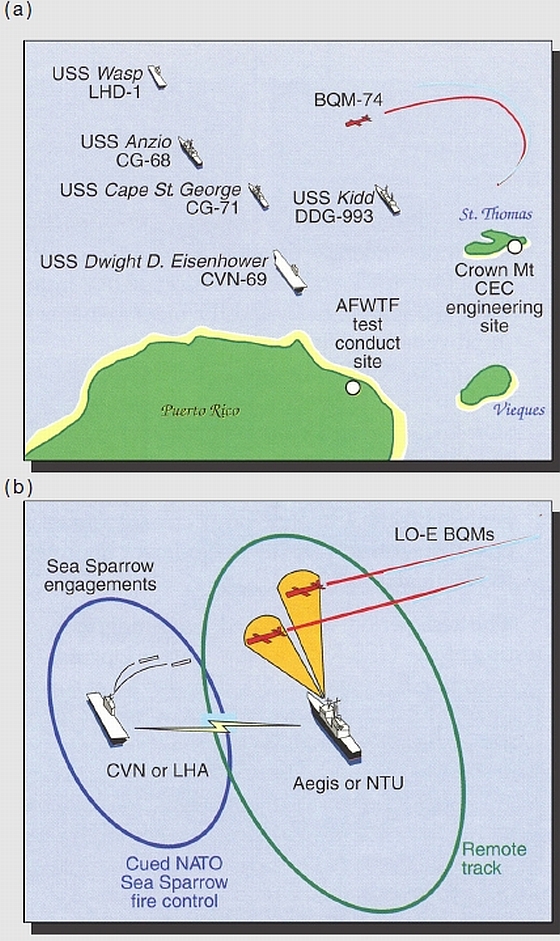
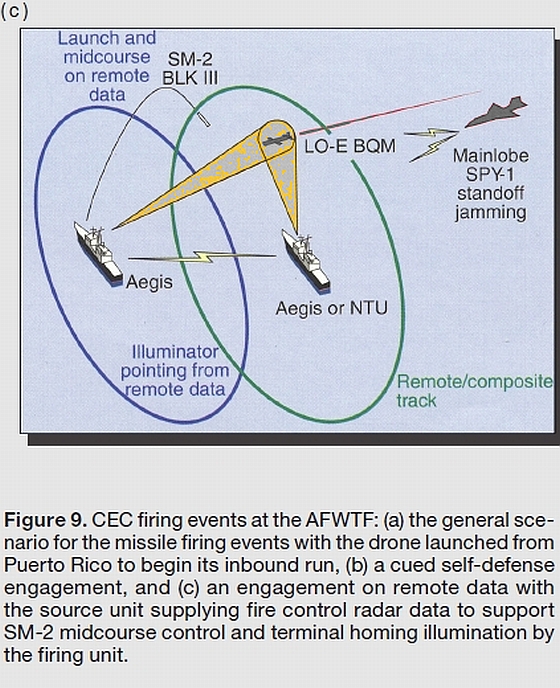
1994年6月CEC在艾森豪號航母打擊群測試的兩個情境 隨後在6月,艾森豪號的航母編隊在靠近波多黎各的大西洋艦隊武器測試中心(Atlantic Fleet Weapons Test Facility,AFWTF)進行了CEC的第一次實際接戰測試項目。在這項測試中,BQM-74E靶機從波多黎各升空向東飛行,然後向西迴轉,朝向這支航母編隊所在的海域以及低高度飛行飛行,模擬水平線外飛來的掠海反艦飛彈。此項測試包含兩個情境:
第一個情境:配備近程點防空自衛系統的船艦根據CEC的先期提示(cued)進行接戰。測試中,搭載CEC以及SSDS的胡蜂號(USS Wasp LHD-1)兩棲突擊艦 負責攔截,接戰兩枚在水平線以外發射、掠海飛行的BQM-74E飛靶;在這兩枚標靶進入胡蜂號的水平線之前,胡蜂號已透過CEC接收到神盾巡洋艦、紀德號探測的目標資訊 ,艦上的SSDS防空系統預先啟動,海麻雀飛彈系統的MK-91射控雷達、發射器都已經指向目標來襲方位;等兩架靶機一進入胡蜂號的搜索雷達偵蒐範圍,該艦便立刻發射RIM-7P++海麻雀防空飛彈,並在飛彈的最大射程附近 擊落這兩架BQM-74目標。此一測試充分展現CEC的價值,使許多只有短程防空自衛系統的艦艇有更充裕的反應時間,大幅增加了攔截概率。 第二個情境:配備神盾或NTU系統的防空艦透過CEC實現遠隔接戰。在此項測試中,裝備CEC系統的紀德號(USS Kidd DDG-993)透過CEC取得另外兩艘神盾艦提供的目標參數,發射SM-2防空飛彈 ;而在SM-2防空飛彈飛行期間,紀德號完全以CEC傳來的神盾艦雷達實施導引,包括飛行中途實施指令上鏈傳輸,並在SM-2飛彈進入終端時啟動MK-74照明雷達朝目標實施照射直到命中;整個接戰過程中,紀德號完全沒有用自身的SPS-48E長程搜索雷達追蹤目標,這是要模擬防空艦在本身雷達受到強烈電子干擾而無法克服時,完全仰賴友艦透過CEC網路傳來的探測資料完成遠隔接戰。 聯合特遣武力95(JTF-95) 完成前述在AFWTF的實戰測試後,艾森豪號的航母編隊隨即開始準備另一項大規模的CEC能力展示,稱為聯合特遣武力95(Joint Task Force-95,JTF-95),這是美國國防部進行的第一次大規模聯合特遣武力演習(Joint Task Force Exercise,JTFEX)。除了前述五艘艾森豪號航母編隊的船艦以及搭載CEC傳輸端的P-3B預警機之外,這項展示還有陸軍與空軍單位加入,主要目的是展示CEC網路追蹤戰區彈道飛彈的能力。這項概念展示工作首先在諾福克外海的維吉尼亞角(VACAPES) 進行,除了艾森豪號的戰鬥群之外,陸地上也有一個美國陸軍愛國者(Patriot)防空飛彈單位以及一個海軍陸戰隊的TPS-59電子掃描雷達單位(整合至CEC網路)參與。在維吉尼亞角的初步整合測試中,模擬戰區彈道飛彈的靶彈發射升空後不久,艾森豪號戰鬥群的神盾巡洋艦安奇奧號很快就以SPY-1相位陣列雷達探測到目標,隨即透過DDS將目標情資傳遞給其他CEC節點,以及位於陸地上的艦隊作戰指揮系統輔助活動(Fleet Combat Direction Systems Support Activity,FCDSSA)的戰鬥系統;於是在若干秒鐘之後,CEC網路其他節點如聖喬治岬號神盾巡洋艦、紀德號飛彈驅逐艦、胡蜂號兩棲突擊艦以及FCDSSA的雷達依照安奇奧號的指引,都順利追蹤到彈道飛彈靶。這個CEC網路持續成功追蹤這枚彈道飛彈靶的全程飛行並維持複合態勢圖像,直到落海。這項測試成功展現了CEC用於反彈道飛彈任務的潛力。 隨後,艾森豪號航母在1994年10月部署到地中海,準備進行JTF-95的正式演習,包括英國、義大利、加拿大、荷蘭的觀察員都在場觀摩。 JTF-95演習於1995年3月在南亞得里亞海(義大利半島與巴爾幹半島之間)展開,除了前述五艘船艦以及搭載CEC傳輸端的P-3B預警機 之外,部署在德國的美軍愛國者防空飛彈也參了JTF-95與演習。在JTF-95演習中,艾森豪號航空母艦透過資料鏈將CEC計算出的整合空域追蹤資料傳輸給位於德國的愛國者飛彈系統陣地 ;依照APL最初規劃,艾森豪號與愛國者飛彈陣地之間透過Inmarsat衛星資料鏈傳輸,但最後執行時似乎是透過P-3B作為中繼傳輸,以類似Link-16等級 的資料鏈來傳輸資料。總共有31枚模擬的戰術彈道飛彈由北非發射,艾森豪號的 航母戰鬥群偵測到飛行中的彈道飛彈軌跡,進而計算出飛彈落點,然後將雷達追蹤資料經由資料鏈,傳給1450km外的愛國者飛彈陣地實施攔截──此時彈道飛彈尚未進入愛國者飛彈的雷達偵測範圍。此外, 航母戰鬥群也根據飛彈軌跡計算出發射地點,並立刻傳給在空中待命的F/A-18戰鬥機,對敵方彈道飛彈陣地實施炸射。 除了展示CEC在反彈道飛彈任務的能力之外,JTF-95演習中也有個CEC示範科目 :一艘搭載CEC的神盾艦先發射SM-2、再交由另一艘神盾艦導引,稱為超前導引(Forward Pass)。在這項測試中,這兩艘神盾巡洋艦分佈在彼此的水平線以外,靠著搭載CEC節點的P-3B預警機作為空中傳輸中繼;此時,這架P-3B機上已經裝載初期設計的介面,因此機載APS-138預警雷達以及敵我識別器的資料也可以輸入CEC網路中,這是機載CEC系統第一次進行完整功能測試。 CEC Baseline 1形成初始作戰能力(IOC) 到1996年,CEC預計解除操作限制,並通過初始作戰能力( Initial operational capability ,IOC)的評估作業。 在 1996年1月,一艘安裝USG-2 Baseline1設備的提康德羅加級飛彈巡洋艦伊利湖號(USS Lake Erie CG-70)在夏威夷太平洋飛彈靶場(PMRF)成功進行了CEC的第一次實際接戰測試 ,這項測試是海軍巡航飛彈防禦先進概念技術演示 ( Navy Cruise Missile Defense Advanced Concept Technology Demonstration, Navy Cruise Missile Defense,ACTD)的一個測試項目,又稱為山頂(Mountain Top)測試。此項測試由伊利湖號以及 一套安裝在夏威夷考艾島(Kauai)Kokee山頂(標高3800英尺,1158.24m)、用來模擬E-2D空中預警機的地面雷達組進行;這個山頂雷達組包括一具 模擬E-2預警機的雷達,使用美國海軍與麻省理工學院林肯實驗室合作的雷達監控技術實驗雷達 ( Radar Surveillance Technology Experimental Radar, RSTER,詳見E-2鷹眼預警機一文;這是一種UHF固態電子掃描雷達,1984年開始研發,後來成為E-2D先進鷹眼預警機的APY-9雷達的 技術基礎 ),此外搭配一套MK-74飛彈射控雷達含SPG-51 X波段照射雷達( 模擬E-2C預警機加裝額外的X波段照射器),整套雷達設施透過CEC終端來與神盾艦協同作業(此時 搭配E-2C的CEC機載版體積重量過大,尚無法裝機 )。在這次測試中,四架BQM-74E次音速靶機從考艾島發射升空,其中一架在15000英尺(4572m)的高度飛行,另外三架則以50英尺(15.24m)的低高度以將近一馬赫的速率飛行,模擬低空巡航飛彈;四架全部位於伊利湖號所在位置的水平線以下 ,所以該艦的SPY-1相位陣列雷達無法發現。位於考艾島山頂的RSTER雷達發現這些低飛靶機之後,透過CEC將探測資料時實傳送給伊利湖號。接著伊利湖號靠這些資訊發射四枚 修改過的SM-2 Block 3IIIA防空飛彈, 發射後伊利湖號透過CEC傳來的山頂雷達資料,持續為四枚SM-2實施中途上鏈更新(上鏈傳輸仍由伊利湖號的SPY-1雷達負責),飛彈接近目標後由Kokee山頂的MK-74射控雷達接手終端照射工作,成功地擊落所有靶機;整個測試中伊利湖號本身的雷達 完全沒有與目標接觸,也沒有參與終端導引飛彈的工作,而這也是美國海軍史上首次有艦艇擊落在其水平線以下的目標 ,攔截距離是過去SM-2依照傳統方式接戰的三倍,刷新美國海軍攔截大氣層內目標的距離紀錄。此外,在該年的測試中,3艘提康德羅加級飛彈巡洋艦成功地與陸上單位完成了射控等級資料的傳輸。 完成這項測試後,CEC於1996年達成初始戰鬥能力(IOC)。 依照當時CEC的發展計畫,在1997年會測試幾個CEC更進一步的工程發展模型,在1998年展開作戰評估(operational evaluation);而正式服役版本的CEC系統會在1999年完成,取代先前測試發展階段的早期版本。 CEC正式版本 (Baseline 2)的發展與測試 工程發展階段的CEC Baseline1的成功後,美國海軍繼續研發更先進的正式服役版本CEC Baseline2,由雷松與洛克西德.馬丁(以下簡稱洛馬)進行。雷松發展的CEC Baseline2.1整合入供航母、兩棲艦艇使用的「艦艇自衛系統」(Ship Self-Defense System,SSDS)中,於2003~2004年間完成;而洛馬發展的CEC Baseline 2.2則與神盾戰鬥系統、艦載反彈道飛彈系統整合在一起,並納入與Solipsys公司合作發展的「戰術成員網路」(TCN)技術,能形成一個具有彈性的大規模網路。神盾系統從Baseline6.3版本起,便整合了CEC能力。 在1997年夏季,胡蜂號(USS Wasp LHD-1)兩棲突擊艦裝載AN/USG-2終端設備,進行CEC Baseline 2的初始作戰測試評估(Initial Operations Test and Evaluation,IOT&E) ,此次測試中AN/USG-2與艦上新近安裝的先進作戰系統(Advanced Combat Direction System ,ACDS)相互配合;在這項測試中,在維吉尼亞角(VACAPES)測試場附近水域的胡蜂號透過CEC與Link 16資料鏈,同時位於維吉尼亞州瓦勒普斯島(Wallops Island, Virginia)的陸基神盾作戰系統中心(Aegis Combat System Center)的神盾武器系統(Aegis WeaponSystem,AWS),以及位於維吉尼亞州的艦隊戰鬥指揮支援活動(Fleet Combat Direction Support Activity, Dam Neck, Virginia)的ACDS陸基系統進行協同作業。在這項測試中,雖然CEC本身工作算是正常,但如果同時也透過頻寬較低的Link 16資料鏈進行資料分享時,會發生一些交互操作的問題。 USG-2 Baseline2(AN/USG-2 )的原型設備於1998年安裝在甘迺迪號(USS John F. Kennedy CV-67)航空母艦以及提康德羅加級飛彈巡洋艦順化號(USS Hue City CG-66)與維克斯堡號(USS Vicksburg CG-69)上;順化號與維克斯堡號原本預計在1998年夏季進行AN/USG-2 Baseline2的作戰測試評估(OPEVAL ),但在這麼短時間內顯然無法與這些船艦上的神盾系統有效整合,因此美國海軍主管戰區水面作戰的計畫辦公室(Program Executive Officer for Theater Surface Combatants,PEO(TSC))決定將CEC的OPEVAL推遲到2001年。接下來,美國海軍在柏克級飛彈驅逐艦的奧斯汀號(USS Oscar Austin DDG-79)、梅森號(USS Mason DDG-87)、馬斯丁號(USS Mustin DDG-89)以及胡蜂級兩棲突擊艦的硫磺島號(USS Iwo Jima LHD-7)上安裝CEC設備。 在1999年,提康德羅加級飛彈巡洋艦順化號與維克斯堡號進行CEC首次海上發展測試作業,測試中暴露出不少問題,這主要是由於系統開發階段獲得的時程與資金都較為有限之故;受此刺激,之後美國海軍提高了開發CEC的優先程度。在1999年,甘迺迪號航空母艦加裝先進戰鬥指揮系統Block 1(Advanced Combat Direction System Block 1,ACDS Block 1)以及CEC終端,進行CEC在航母戰鬥群之間的第一次實際海上測試,結果甘迺迪號與編隊中順化號、維克斯堡號上的神盾Baseline 6版軟體透過CEC連結運作時,發生了許多問題,導致這兩艘神盾巡洋艦退出當時的部署任務,測試以失敗收場;這促使美國隨後重新規劃CEC與神盾系統的研發整合工作,增加更多戰鬥系統的整合工作,隨後並衍生出分散工程平台(Distributed Engineering Plant,DEP)計畫,主要是將許多美國海軍現有的軟體開發工作進行連結,並進行更多和岸基系統之間的連結測試工作;此外,戰鬥系統透過DEP與特定戰鬥群進行資料存取交聯等,也是重要開發工作之一。在1999財年,美國追加3000萬美元在DEP、資料收集以及修正CEC在航母戰鬥群之間交聯運作時發生的問題;此外在同一 財年中,CEC與神盾Baseline 6.1的整合工作也獲得了額外的研發資金,用來解決與其他戰鬥群交聯時的問題,另外CEC與神盾Bbaseline 6.3、7、7.1的開發工作也獲得了更多資源挹注,增加許多神盾武器系統(AWS)軟體與CEC的整合測試工作,不過這些額外的測試並不影響當時柏克級增添CEC能力的進度。這些CEC早期奠定基礎的測試工作顯示CEC固然效益良好,然而需要大量計算機運算能力,較老舊的艦艇無法負荷,除非大幅更新作戰相關的計算機系統。 在2001年2月27日到3月,搭載CEC Baseline 2設備的甘迺迪號航母戰鬥群在波多黎各測試場( Puerto Rico Operations Area)以及維吉尼亞角(VACAPES)測試場的水域進行CEC的技術評估(TECHEVAL)作業,評估期間戰鬥群模擬遭到來自海上、陸地的多重攻擊,同時也包括強烈的電子干擾;在這項技術評估中,甘迺迪號的戰鬥群靠著CEC網路在高強度戰場環境下持續快速、低空、小型目標保持良好的追蹤,CEC網路始終保持良好的可靠度與穩定性,而且CEC聯合作業的整合態勢圖像(SIAP)經常保持在將近完美的狀態。 完成技術評估之後,接著甘迺迪號戰鬥群在2001年4月到5月進行CEC Baseline 2的作戰評估(OPEVAL),這是當時美國海軍所進行過規模最大、最為複雜、測試最廣泛嚴苛的作戰測試。在為期18天的海上作戰測試評估中,包括甘迺迪號戰鬥群的10艘船艦、飛機198架次專門作戰、43次無人機飛行,戰鬥群並發射29枚飛彈。演習中聯合作戰指揮官(COTF)以各種手段打擊這支航母編隊,包括以飛機發射高空俯衝反艦巡航飛彈、地面發射飛彈、掠海反艦飛彈、電子干擾等等;在所有演習情境中,甘迺迪號戰鬥群的CEC作戰網路顯著提高戰鬥群的交戰空間,各艦持續追蹤目標時也遠比以往傳統單艦追蹤更為容易。在1998到2001年間,CEC系統歷經的測試強度、深度、廣度堪稱前所未有,而CEC本身也禁得起考驗,證實能在威脅與壓力程度最高的環境下,顯著水面戰鬥群的作戰效率與存活率。OPEVAL完成時,聯合作戰指揮官總結,CEC Baseline 2能有效且適應作戰需求;以這樣複雜的系統能獲得無條件的驗收通過,在美國海軍武器系統發展史上堪稱罕見。 至於E-2C與機載CEC的組合則預定在1999年達成初始作戰能力(IOC)。2000年起陸續交機的E-2C最新規格──鷹眼2000(Hawkeye 2000)已裝備AN/USG-3終端設備,具備CEC能力(資料傳輸/中繼)。USG-3在2000年代初期由尼米茲號(USS Nimitz CVN-68)航母上的VAW-117預警機中隊展開測試,該中隊5架E-2C都將安裝USG-3終端設備。擁有CEC能力之後,如果再加上專門負責提供照射的X波段射控硬體,E-2C等空中載台就能直接為 艦艇發射的防空飛彈提供照射,但目前美國似乎沒有展開相關的研發計畫(可能是因為E-2C如果再加裝專用的照射裝備就會減低續航力),而且新一代SM-6艦載防空飛彈具有主動雷達尋標器,使得預警機 不再需要提供終端照射,只需透過CEC來為SM-6/AIM-120 C7等主動雷達導引飛彈(都有資料鏈)提供中途資料更新,就能達成完整的超地平線攻擊能力。 在2009年5月8日,美國成功進行一次SM-6搭配E-2D空中預警機進行的協同接戰(CEC)測試,由一架E -2D透過CEC為一枚從另一個平台發射的SM-6進行導控,成功攔截一枚從陸地上飛來的巡航飛彈靶。 最初CEC是美國海軍本身的感測器聯往作戰需求,但這些成就隨後獲得其他軍種的重視。美國海軍陸戰隊的AN/TPS-59預警雷達就是第一種整合入CEC作戰網路的地面單位。美國海軍陸戰隊單位也曾展示藉由CEC的先期指引資訊,發射鷹式防空飛彈(Homing All the Way Killer Missile, HAWK)、先進中程空對空飛彈(AMRAAM)、復仇者防空飛彈等等。
CEC的部署 美國海軍在1990年代末期與雷松公司簽訂了48套CEC Baseline1設備的低速初期量產合約(後來增加至67套)。在2002年4月,CEC的AN/USG-2艦載設備達成里程碑III(Milestone III)全速量產決定(Full-Rate Production,FRP decision),在2003~2004年間的低速初期生產(LRIP)之後,隨即進入全速量產階段,此時預計採購215套CEC Baseline2的CETPS。神盾Baseline7將整合入CEC Baseline2,而神盾系統較早期的版本在提升時也會將CEC納入。至於供E-2C鷹眼2000使用的AN/USG-3也在1990年代末期開始由雷松公司進行低速初期生產(LRIP)。CEC項目的採辦作業是漸進,並定時進行軟體或硬體的升級,以符合未來戰場威脅的演變。 在2014年4月14日,美國海軍部主管研究發展與採辦(Research, Development and Acquisition)的助理部長(Assistant Secretary of the Navy)計畫辦公室(PEO)簽署備忘錄,授權E-2D先進鷹眼預警機的AN/USG-3B機載設備進入全速量產階段。在2014財年,AN/USG-3B設備進行了發展測試階段IIID(Development Test,DT-IIID)以及作戰測試IIIF(Operational Test,OT-IIIF)階段,期間曾發現一些軟體缺陷,隨後在Track File Concurrence短期程序進行修正。 在2011到2019財年,CEC進行加速中期交互能力改進計畫(Accelerated Mid-Term Interoperability Improvement Project,AMIP),涵蓋CEC在神盾巡洋艦與驅逐艦、搭載船艦自衛系統(SSDS)的艦艇(如航空母艦、兩棲艦等)、E-2C鷹眼2000(Hawkeye 2000)空中預警機等,而E-2D的AMIP項目則在2019財年啟動與交付。AMIP項目包括通用航空指揮管制系統(Common Aviation Command and Control System ,CAC2S)第二階段( Phase 2),在2015年底進行發展測試(DT),2016財年第二季進行作戰測試(OT)。在2015年底時,DDG-1000松華特級驅逐艦尚未納入CEC AMIP計畫。而根據AMIP項目的結果,美國海軍接著會進行遠期交互改進項目( Far Term Interoperability Improvement Project),也就是遠期戰鬥系統設計變更(Far Term Host Combat System Design Changes)。 在2016財年的研究/發展/測試/評估項目(Research, Development, Test, and Evaluation,RDT&E)中,美國國會決定暫緩通用停火陣列(Common Array Block,CAB)發展計畫。CAB原本打算用來取代CEC現有的平板陣列天線組(Planar Array Antenna Assembly,PAAA);這項延遲會使正在設計的柏克Flight3飛彈驅逐艦的通用停火陣列天線功能設計包(Common Array Block Functional Design Package)的交付進度約達四個月,使柏克Flight3的計畫進度受到影響。在2016財年以後,美國海軍不再繼續照原訂向雷松採購PAAA天線組,並啟動一個1400萬美元的附加項目,如有必要就會尋求PAAA的第二 承包商。
CEC的外銷 除了美國海軍之外,一些西方國家也準備建構自己的CEC。英國皇家海軍計畫以美國CEC的基礎發展自己的CEC,包括雷松與洛馬參與競標,而皇家海軍也購買了一套USG-2設備進行地面測試 ;然而在2012年的評估報告中,英國暫時同終止CEC,未來觀察CEC在美國海軍的使用情況再做決定。 此外,一些北約國家海軍以及日本海上自衛隊也正在評估CEC。澳洲是第一個獲得美國出口CEC的盟國,裝備於2010年代建造三艘裝備神盾系統的霍巴特級(Hobart class)飛彈驅逐艦上,相關的CEC終端系統軟硬體在2017年12月由美國雷松公司研製完成;而日本2015年從美國訂購新型神盾作戰/反彈道飛彈系統(Baseline 9/BMD 5.0以上的水平)用於兩艘新造27DDG型飛彈驅逐艦,也包含CEC協同接戰能力以及NIFC-CA(見下文)。
NIFC-CA海軍整合射控防空項目 在1996年,美國海軍啟動名為「跨陸地巡航飛彈防禦」(Overland Cruise Missile Defense,OCMD)的研究項目,希望能結合不同感測平台,在陸地上空就能發現並攻擊敵方巡航飛彈;基於OCMD,美國海軍又推動空中定向地對空飛彈(Air-Directed Surface-to-Air Missile,ADSAM)計畫,以滿足OCMD需求,對應遠程巡航飛彈對海上船艦與岸上部隊的威脅。在ADSAM計劃展開之前,美國海軍已經意識到,OCMD如光靠艦載系統就無法發揮預期效能,主要是因為地球曲率和地形障礙阻擋了雷達視線,使雷達無法偵測到內陸上空的低空飛行目標。此外,巡航飛彈可以在中途改變航向,這與接戰和有人飛機一樣帶有不確定性。 在1995年,美國海軍航空系統司令部(NAVAIR)委托約翰霍普金斯大學的應用物理實驗室(APL)研究ADSAM的發展概念;在此概念之下,美軍設想使用機載感測器追蹤目標,且盡可能地提供照射導引,通過CEC協同接戰能力,將高品質的感測數據傳到位於海上的神盾艦上。這使得神盾艦即便本身雷達還沒有探測到敵方飛彈,但也可以進行接戰(相當於「遠隔接戰」的情境)。依照當時APL的研究規劃,這樣的攔截體制逐漸成形,包括E-2鷹眼預警機、改進型的大型陸基偵察機(如P-3C衍生型)、安裝在空中平台的X波段火控照射器,以及負責搭載與發射防空飛彈的神盾艦艇,基本上就是在1996年初的山頂測試的體系;這些平台透過CEC能力來交換所需的高品質目標動態圖像以及接戰期間的火控數據。 進入2000年代時,美國海軍打算以當時開發中的新型標準5型(SM-5)艦載防空飛彈作為OCMD的攔截器,SM-5能以資料鏈接收鷹眼空中預警機更新的目標指引。SM-5後來併入海軍區域彈道飛彈防禦(Navy Area Defense,NAD)的範疇,但NAD在2001年初因成本超支、計畫落後等因素取消。之後,原本SM-5的需求被移增程主動歸向飛彈(Extended- Range Active Missile,ERAM)取代,ERAM成為標準SM-6,基本上是將AIM-120C-7中程空對空飛彈的主動雷達尋標器與信號處理設備移植到SM-2 Block 4導彈的彈體內。 在2002年,OCMD正式改名為整合射控防空項目(Naval Integrated Fire Control-Counter Air,NIFC-CA)。NIFC-CA除了繼承原先OCMD的目標外,還增加了對付視距外有人戰鬥機和反艦巡航導彈的能力。與此同時,美國海軍整合作戰系統計畫辦公室(Integrated Warfare Systems,PEO IWS)奉命成立一個NIFC-CA系統工程和整合計畫項目辦公室,將所有相關機構集中到同一個體系中。 NIFC-CA是一種由現有基礎系統堆疊組合而成的複式系統(System of Systems,SoS),由數個現有的系統構築而成;因此,並沒有專門針對NIFC-CA開發的基礎建設或次系統,而且NIFC-CA本身的規格也不會干涉底下每個相關系統各自的發展,只要求每個次系統提供標準的介面讓NIFC-CA存取。在發展初期,NIFC-CA結合E-2D空中預警機、由氣球搭載的JLENS雷達、海軍神盾艦艇、CEC協同接戰能力以及具備終端主動雷達導引能力的標準SM-6防空飛彈;而後續的發展則是只要追蹤品質夠好的資料,即便是來自單一平台而非透過CEC,也可上傳到NIFC-CA網路中,因此之後戰鬥機以及機上的空對空飛彈、無人飛行載具等也逐步整合入NIFC-CA網路中。 NIFC-CA系統基於先進數據網絡,實現航空母艦、主戰船艦、艦載機等航母打擊群裡重要作戰單元的無縫鏈接,構築一體化的「偵察-火力-打擊」體系,綜合運用偵察預警、火力攔截、電子對抗等多方面的作戰力量,提升航母編隊的超視距態勢感知和防空反導能力。NIFC-CA系統在概念階段就納入來自海上(From-The-Sea,FTS)、來自空中(From-The-Air,FTA)、來自陸地(From-The-Land,FTL)的三類殺傷鏈(Killing Chain),並能將防空與反飛彈作戰的殺傷鏈交迭,以擴展整個作戰空域,減少防禦漏洞,提供最大限度的對目標再次攔截能力。 NIFC-CA的核心基礎建設,自然是 能時實交換大量數據、產生單一戰場態勢圖CEC。對於神盾系統而言,結合NIFC-CA是從神盾Baseline 9/TI-12硬體架構版本開始,將所有射控邏輯完全物件化,無論是來自CEC或單一平台雷達(自身或其他平台)的資料都是平行的物件,只要品質夠好,都可以用來為飛彈射控導引;當然,NIFC-CA網路數據傳輸必須是火控級品質 (Fire Control Quality Data),具備微秒級同步的精確座標,精確到足以導引 SM-6 飛彈飛向預定碰撞點,而不需要發射平台本身的任何接觸。 NIFC-CA構築了一個完善的資料分享平台,並以相同的邏輯與程式來處理、分配資料;在NIFC-CA之下,E-2D預警機與神盾艦等擁有高品質雷達的大型載台組成CEC網路 進行協同追蹤,為戰區提供主要的整合態勢圖像,再加上一些其他平台(例如戰鬥機)傳來的感測器資訊,並透過Link-16等頻寬較低的資料鏈,將圖像資料分享情資給空中的艦載機(F-35C、F/A-18E/F、F/A-18G咆哮者電戰機等)。NIFC-CA作戰網路提供了一個完整的 遠隔接戰支持平台,NIFC-CA網路中任何節點都能 從網路下載目標資料(集結網路中各個節點彙整的目標資訊,無論是來自CEC網路的共同運算結果或者是單一平台提供的探測資料), 自己發射飛彈(無論是戰機的空對空飛彈或船艦的防空飛彈)接戰,或者調用NIFC-CA網路中其他平台的飛彈來接戰這個目標;飛彈升空後透過網路其他節點由CEC提供射控支援,而不一定要發射平台本身的雷達接觸與射控解算。 在初期規劃中,NIFC-CA系統的對海打擊鏈由E-2D先進鷹眼預警機、聯合對地攻擊巡航飛彈防御用網路感測器系統(JLENS)、CEC協同作戰系統、神盾系統、標準SM-6飛彈等五大部分組成,未來還會進一步擴展,納入更多的作戰要素如P-8A、無人機等其他空基感測平台以及F/A-18E/F與F-35戰鬥機。其中,E-2D預警機堪稱NIFC-CA的關鍵指揮中心,搭載能力強大的APY-9電子掃描雷達飛在空中,能嚴密監控遠在船艦水平面以外的空域範圍;E-2D本身不僅有良好的態勢感知能力,也兼具強大的戰場管理和多感測器數據融合能力。 通過CEC以及NIFC-CA,E-2D預警機能結合自身和其它偵察監視系統的感測器取得目標數據,並融合成整體作戰態勢圖,然後指揮不同系統(水面船艦或空中軍機)的火力,打擊空中和飛彈等威脅,通過建立交戰優先權,匹配最合理的武器給目標。 美軍的「2014-2025年美國海軍航空兵構想」中曾提出,E-2D預警機等作戰飛機要加強與水面艦船等武器平台的協同,實現一體化作戰,並一起構成打擊鏈,主要涵蓋18個環節;其中,E-2D預警機是打擊鏈中核心節點,主要完成9個環節,包括發現目標、形成航跡、新增航跡和態勢圖相參、識別和分類、發射攔截器、中段引導、移交飛彈自行引導、攔截與殺傷效果評估。 而聯合對地攻擊巡航導彈防御用網絡傳感器系統(JLENS)則由2艘長74m、搭載雷達的軟式繫留浮空飛艇以及相關的機動式繫泊站、通信和處理設備等構成。此種飛艇的飛行高度為3048m,能持續在空中執行任務30天。JLENS系統兩艘飛艇中,其中一艘裝備遠程監視雷達來進行360度全方位監控,可同時跟蹤數百個目標;另一艘則裝載了高性能射控雷達,能同時追蹤幾十個威脅目標。JLENS對空中的飛機的偵測距離是半徑340英里的圓形區域,對於低空飛行器的探測距離則為140英里。可對來襲巡航飛彈進行有效的超地平線探測、跟蹤和識別,為防空系統提供及時警告且迅速發射攔截武器。 在2012年,美國進行NIFC-CA進行陸上試驗,以部署在JLENS飛艇的雷達,指揮位於新墨西哥州白沙測試場上、用來模擬標準防空飛彈系統的沙漠之舟(LLS-1)發射的SM-6飛彈,成功進行跨地平線接戰測試。 在2013年8月,美國海軍首次進行由神盾艦發射標準SM-6防空飛彈結合NIFC-CA作戰網路的海上實彈試射,成功擊落兩架在神盾艦水平線以外的BQM-74靶機。在2014年初,美國海軍驗證了E-2D空中預警機(裝備APY-9電子掃描雷達)與NIFC-CA整合,並通過Link 16資料鏈向在空中的F/A-18戰機,以及通過CEC資料鏈向水面神盾艦提供目標信息。 在2015年,NIFC-CA FTS 增量1(Increment 1)進入美國海軍服役,全面與艦隊中的裝備整合,且正式成為艦隊防空作戰的可選方案。之後神盾系統先進能力構築(ACB)16和20、感測器改進和SM-6 Block 1A,都會納入NIFC-CA FTS增量2測試,並在2019~2020財年進行能力交付。 在2016年6月,美國海軍表示,正將F-35戰鬥機的感測器納入NIFC-CA網路中(F-35透過Link 16資料鏈接收,並由為匿蹤戰機設計的新型低跡訊資料鏈發送),使F-35也能為NIFC-CA提供目標指引與中繼導引資料,其他準備納入的空中平台包括P-8A海洋巡邏機、MQ-4C海神(Triton)無人飛行載具等(都使用Link-16資料鏈) 。過去E-2D空中預警機是CEC提供跨地平線探測的重要來源,並作為CEC平台之間的中繼傳輸(採用C波段傳輸的CEC不能直接跨地平線),因此E-2D無法飛離艦隊太遠,例如深入內陸;而F-35戰鬥機就彌補了這項弱點,其匿蹤能力可長時間深入敵境,機上強大的相位陣列雷達以及運算處理能力也足以替代部分空中預警機的能力;此外,F-35戰鬥機數量比起E-2D空中預警機更多,甚至連盟邦的F-35在必要時都可納入NIFC-CA網路。另外,由於F-35戰鬥機的武器籌載有限(機腹彈艙只能容納四枚空對空飛彈),因此即便在本身飛彈耗盡後,仍能透過NIFC-CA調用後方友軍其他飛彈如神盾艦的SM-6來繼續接戰。在2016年9月,美國海軍在新墨西哥白沙測試場測試以F-35透過NIFC-CA提供資料,導引SM-6攻擊模擬水面船艦的攻擊目標。 在2016年9月12日,美國海軍、海軍陸戰隊與洛馬集團合作成功進行第一次F-35B戰機與神盾武器系統透過NIFC-CA增量1進行的聯合實戰測試;在演習中,海軍陸戰隊測試評估第一中隊的一架F-35B將本身感測器探測到的目標透過機上的多功能先進資料鏈(MADL)傳輸到地面站,經由NIFC-CA傳輸給新墨西哥州白沙測試場上、裝有神盾武器系統的沙漠之舟(LLS-1)地面設施,LLS-1隨即根據F-35B的傳感資料發射一枚標準SM-6,成功攔截並摧毀目標。這次驗證測試表明,NIFC-CA FTS增量1完全有能力透過機載感測器向艦載神盾武器系統提供火控級數據。在這項測試中,LLS-1使用測試站點版的非戰術計算機工程軟體來與資料鏈網路連結,接收來自F-35戰機的MADL的目標軌跡數據。依照美國海軍說法,F-35要等到Block 3F以後才具備真正的CEC能力,搭載CEC運算的相關設備,能結合其他雷達的信息進行運算;屆時機上配套的資料鏈也可能不是MADL。 到2016年,NIFC-CA的項目已經成功執行過超過200次的實際目標追蹤,其中包含7次成功的實彈射擊測試,成功驗證了NIFC-CA的超視距遠隔作戰能力。 CEC結合陸軍防空系統 在2020年代,為了對應中國、俄羅斯、北朝鮮的飛彈對於美軍重要戰略據點的威脅,美國飛彈防禦局(MDA)開始研究將原本分屬於陸軍與海軍的系統融合在一起運作,包括跨系統之間建構遠隔接戰(EoR)能力。在2021年7月,MDA測試聯合追蹤管理能力橋接(Joint Track Management Capability Bridge,JTMC Bridge),陸軍愛國者飛彈系統在不靠本身MPQ-53雷達的情況下,由海軍CEC獲得目標的追蹤資料發射並導引一枚愛國者飛彈摧毀標靶。 在2023年,飛彈防禦局開始構建一套新的 關島防禦系統(Guam Defense System,GDS),稱為整合防空與反飛彈防禦系統(Enhanced Integrated Air and Missile Defense,EIAMD),包括在關島建構一套新的關島陸基神盾系統(Aegis Guam System,AGS),並整合原本部署在島上的陸軍高高度防禦系統(Terminal High Altitude Area Defense ,THAAD)與愛國者防空飛彈系統;整套系統的聯合指揮中心是結合陸軍整合戰鬥管理系統(IBCS)與來自海軍技術的陸基神盾武器系統,此外還結合一種指揮管制戰場管理通信(Command and Control, Battle Management, and Communications,C2BMC)。在EIAMD之中,各型陸、海軍系統能由交互由其他系統的感測資料實施火控制導,在單一系統的感測器遭到干擾或摧毀的情況下,仍能靠其他系統感測器指引下完成接戰。
|