連續追蹤反潛無人載具(ACTUV)
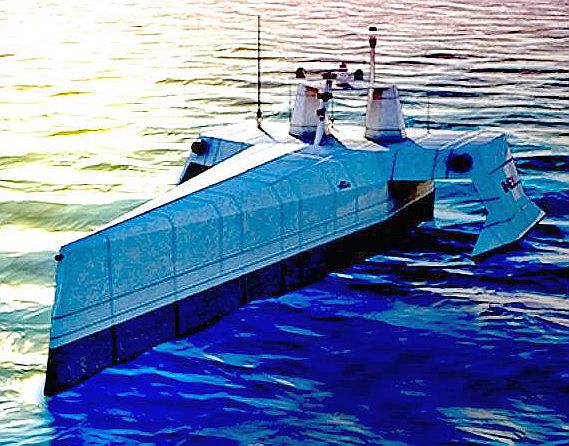
第一艘ACTUV原型載具海獵人號(Sea Hunter)由Leidos公司的維格船塢(Vigor Shipyards)建造,攝於2016年1月底
海獵人號下水前夕。海獵人號採用三船體設計,兩側各有一個增加浮力與穩定性的浮體。

(上與下二張)下水後的海獵人號。



海獵人號在2016年2月27日試航的照片,在此次試航達到27節的最高速率。

航行中的海獵人號

海獵人號通過珍珠港,背景是密蘇里號(USS Missouri BB-63)戰鬥艦

2021年4月20日,海獵人號從聖地牙哥的勞馬角海軍基地(Naval Base Point Loma)出發,準備參與無人整合戰鬥課題21
(UxS IBP 21) 演習。背景是同樣準備參與演習的松華特級驅逐艦麥可.蒙蘇爾號( USS Michael Monsoor,DDG-1001)
,注意該艦 直昇機起降甲板臨時加裝了額外的衛星通信天線,增強在演習期間與各型無人飛行載具(UAV)
、無人水面載具 (USV)的通信傳輸能力。麥可.蒙蘇爾號在這次演習中擔任各型無人載具(UAV/USV/UUV)
的控制母艦。

2021年4月20日,海獵人號(前)以及第二艘同型無人載具海鷹號(Sea Hawk)(後)一同編隊從
勞馬角海軍基地出發,準備參與無人整合戰鬥課題21(UxS IBP 21) 演習。

2021年4月20日,海鷹號(Sea Hawk)從勞馬角海軍基地出發

(上與下二張) 2021年4月21日,無人整合戰鬥課題21(UxS IBP 21)演習期間的海鷹號(Sea Hawk)



2021年4月21日,無人整合戰鬥課題21(UxS IBP 21)演習期間的海鷹號(Sea Hawk),背景是參與演習的
柏克級飛彈驅逐艦費茲傑拉德號(USS Fitzgerald DDG-62)。

攝於2022年6月的海獵人號,準備參與2022年環太平洋演習(RIMPAC 2022)
──By Captain Picard
|
概觀
在2010年初,連續追蹤反潛無人載具(ASW Continuous Trail Unmanned Vessel,ACTUV)項目在美國國防先進研究計畫局(Defense Advanced Research Projects Agency,DARPA)的資助下正式啟動。 在2013年,美國海軍作戰部的評估部門(Chief of Naval Operations, Assessment Division,OPNAV N81)委託蘭德(RAND)智庫機構,研究美國海軍未來無人水面載具的任務與功能。蘭德的報告結論指出,無人水面載具執行任務遠比傳統在人船艦適合在高風險環境如雷區、面臨敵方強大反介入/區域拒止(anti-access/area-denial (A2/AD)的情況下作業,減低了任務風險;由於無人載具免除了人員傷亡的可能,遂能採取更激進的態勢來扭轉戰場上的戰術態勢或增加資源運用效率。USV適合的任務包括情報蒐集、戰場監視偵察、欺敵、電子戰、網路戰(cyber warfare)等,幫助美國海軍在降低風險的情況下克服敵方的A2/AD挑戰。USV等於將許多軍事能力分散到數量較多、難以鎖定的小型節點上,同時具有良好的跨領域整合能力,透過網路與各種有人、無人節點結合。此外,蘭德也認為在USV領域所發展的相關技術,也能轉移到其他有人、無人作戰平台項目中。 在2014年9月,DARPA簽署海軍研究辦公室(Office of Naval Research,ONR)簽署備忘錄協議(Memorandum of Agreement),聯合資助ACTUV的原型載具。如果一切順利,ACTUV能正式成為美國海軍的反潛項目,並且可能將運用範圍擴展到其他任務,例如水雷反制。 ACTUV是一種可用於戰區或全球部署的無人水面自航載具(Unmanned Surface Vehicle ,USV),主要功能是在水面長時間追蹤敵方潛艦,載具上部署的感測器必須能有效探測先進的靜音型柴電潛艦。ACTUV擁有先進的自航控制能力,將人工介入控制的需求降至最低;岸上的操作單位只須要監視所有部署在外的ACTUV的工作情況,並提供高階的任務指引,而基本的航行控制則由載具的控制系統自行負責,載具的先進航行控制系統能使載具在符合國際海事航運安全的各項規範下航行,避免碰撞。載具與其他單位、平台之間靠著超地平線的資料鏈系統進行資料傳輸。 為了發展海上自主航行載具,美國國防部制訂了無人海事自主架構(Unmanned Maritime Autonomy Architecture,UMAA),使得自航載具上的不同部件如感測器、軟體(含導航、障礙物迴避、機電控制、運行狀態監視、任務行為等)、任務籌載等都予以模組化,根據不同需求進行組合、擴充或裁減。UMAA架構也允許自航載具由外部的控制系統進行遙控(人在迴路),只需要一名人員就能遠端監視與控制。 計畫背景
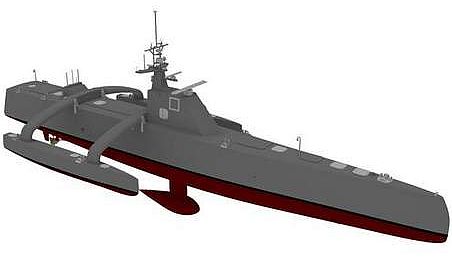
DARPA早期的ACTUV想像圖。 ACTUV主要的運用設想,是部署在靠近海岸的水域,追蹤對手的柴電潛艦。柴電潛艦的價格比核能潛艦低廉得多,更容易被擴散到與美國有敵意的潛在對手,例如北朝鮮、伊朗等;而在21世紀開始迅速壯大的中國海軍,也建立了一支規模在全世界數一數二的現代化柴電潛艦部隊。在科技進步之下,現代化柴電潛艦以電池推進模式的噪音極低,加上近岸淺水域的海岸背景雜訊回波掩護,對於反潛搜索作業造成嚴峻的挑戰;而絕氣推進系統(AIP)技術的日漸普及也使柴電潛艦在水下的潛伏時間大增,需要上浮充電換氣的次數減少,進一步增加了探測的難度。這些潛在敵對國家一旦擁有相當數量的現代化柴電潛艦在近岸周邊水域作業活動,就可能阻止美國海軍對當地局勢的介入(美軍稱之為反介入,anti-access)。讓形勢更嚴峻的是,中國日漸強化的常規制空能力,包括由預警機、戰鬥機、長程防空飛彈組成的防禦網,以及由航空母艦、遠程防空艦艇組織的艦隊,進一步強化了整體的反介入能力,使得美國海軍在靠近中國水域進行反潛探測或其他情報蒐集等空中活動時,越來越容易遭到攔截與阻撓。 反潛向來需要耗費大量的人力物力,有效的區域性反潛屏衛必須由足夠數量的平台與兵力來構成;然而到2010年代以後,因為經濟衰退等因素,美國海軍已經不可能獲得如美蘇冷戰時代那樣充沛的資源,美國海軍能動用的反潛資產(包含空中、水面與核能攻擊潛艦部隊)數量很難在中國海上勢力崛起的情況下,有效兼顧全球範圍的海上壓制。在這種情況下,運用日益成熟的無人自航載具技術,利用成本(包含購置、操作與人事)都低廉得多的無人自航載具來擔負反潛搜索,是一種可行的選擇,讓美國海軍能以更少的人力、物力,維持足夠密度與質量的反潛預警搜索。相較於在空中飛行的反潛機與水面艦艇,體積小的水面自航載具行蹤更隱蔽、更不容易被發現,比較可能在有「反介入能力」的敵國(如中國)的鄰近水域長時間作業活動,而且不會有操作人員面臨生命風險,軍方承受的政治壓力較低。最重要的是,一些整體實力較弱的國家沒有能力與美軍的整體海空優勢抗衡,但他們可以選擇投資在少數針對性領域──例如購置柴電潛艦,以最低的成本創造出最大的不對稱「反介入」能力,使美國海軍要花費相對更多的資源來進行反潛作戰;然而,一旦ACTUV發展成熟並能大量部署在前沿區域,美國海軍就能使用這種比柴電潛艦更廉價的方式,有效化解這些國家企圖透過柴電潛艦來達成的不對稱效益。 運作方式 依照ACTUV的運用想定,此種載具能作為美國海軍全球範圍的海上反潛監視網路的一部分,具備快速部署、反應的能力。ACTUV能自動在海上航行作業60至90天,在追蹤敵方潛艦的同時,還能維持整個作業期間一切的航行安全,避免與其他船舶發生碰撞。ACTUV能獨立進行反潛搜索,或者透過數位資料鏈,與美國海軍其他前進部署的反潛資產如P-8A海洋巡邏機、 MQ-4C海神(Triton)無人飛行載具(UAV)、聲納浮標、LCS濱海作戰艦艇(攜帶反潛作戰模組時)等一同運作。ACTUV的體型與自持能力都比由船艦、潛艦部署的小型水面無人載具(USV)高得多,能攜帶更完善的任務籌載,並且能從沿岸的港口出發並自動返回,而不需要配合另一艘船艦進行部署、收放作業。 在整個反潛體系中,ACTUV扮演的是精確標定潛艦位置並保持追蹤的工作;其他廣區域的反潛單位(如固定式音響監聽設備、船艦上部署的低頻拖曳陣列聲納等)獲得敵方潛艦的第一次接觸信號之後,ACTUV就會快速前往接觸的水域展開搜索,以自身搭載的感測器精確捕獲敵方潛艦;由於柴電潛艦在水下只能低速前進,因此ACTUV一旦捕捉目標,理論上有很高的機率能持續追蹤敵方的柴電潛艦。在過去,通常是由反潛機、水面艦以及搭載的反潛直昇機根據初步接觸而抵達現場,並對目標建立持續的追蹤與接觸;而一旦操作成本低廉得多的ACTUV能分攤這類任務,將能使美國海軍兵力調度的壓力大幅減輕,將更多水面艦艇解放出來執行其他更迫切的任務。 在初步搜索目標時,ACTUV會依靠中頻主/被動動聲納莢艙(兩側的浮體各裝一個)探測附近是否有敵方潛艦存在,作業時會在周圍劃分未確認區域(Area of Uncertainty,AOU) 並逐步進行釐清是否有敵方潛艦的活動,並將附近水面船隻活動產生的噪音逐步排除。發現敵方潛艦的存在後,ACTUV會進一步使用載具船體上的兩個頻段較高的聲納,對敵方潛艦進行精確追蹤,保證任務的可靠度;此外,ACTUV還擁有整體磁場效應陣列(otal field magnetometer arrays),提供額外的信息來協助保持對目標追蹤。一旦確認敵潛艦目標的位置後,ACTUV會使用甚高頻(very high frequency)主動聲納對目標掃描並取得聲學影像,進而判讀目標輪廓外型等特徵,確認目標潛艦的身份與型號。除了確認目標身份、保持追蹤外,ACTUV的任務系統還可根據蒐集到的敵情資訊來初步判斷敵方潛艦的可能動態(例如是否在低速潛伏、等待目標的獵殺狀態)、是否具有威脅等。 ACTUV作業時,透過衛星資料鏈與其他空中、水面平台或岸基單位保持經常性的聯繫。ACTUV會定時回報自身狀況與作業情況,一旦追蹤到目標並初步判斷有威脅,就會發信回報其他單位,召喚友軍軍機或船艦前來獵殺這艘潛艦;而如果ACTUV回報的接觸信號被判定沒有威脅,操作人員可以對這艘ACTUV下達控制指令,使其回到一般巡邏模式,或者選擇繼續讓ACTUV對這個目標保持跟蹤(理論上可以一路追蹤敵方潛艦直到返港)。以ACTUV要求的持續海上操作時間(60到90天),可以超過現有任何柴電潛艦在水下潛伏的時間,即便目標潛艦使用AIP推進系統。除了反潛任務之外,ACTUV也具備發展其他任務的潛力,包括水面巡邏監視、情報蒐集、水雷探測與反制等,因此載具上的任務系統採用模組化設計,能透過加入其他軟體模組來適應其他種類的任務,並可依照任務需求來搭載不同的裝備。 為了確保ACTUV操作時能符合國際海上避碰規範(International Regulations for Preventing Collisions at Sea,COLREGS,內容包含定義船隻接近時的各種航行規定來避免碰撞),ACTUV的航行控制系統必須能在沒有人工協助下,自行辨識附近的海上船舶並且規避。一般而言,水面船舶使用導航雷達探測水面上的其他物體,然而光靠雷達回波沒有辦法正確分辨識別;此外,發射雷達波也會暴露ACTUV的蹤跡。基於在雷達以外的感測器而有效識別水面目標的需求,DARPA在2015年3月發佈了需求徵詢書(Request for Information,RFI),希望能為ACTUV提供有效而準確的近接船隻識別能力;而可能採用的方案包括被動光電/紅外線探測(EO/IR),或者以高速朝四周發射雷射光的光學探測與探測 (Light Detection And Ranging,LiDAR)技術等。 為了使ACTUV的航行控制能滿足穩定性與長期自持的需求,此計畫引進許多新技術;相關研究領域計畫分為四個部分,這些核心的航行控制技術最後集結在原型試驗載具上進行海上測試評估。 建造與發展
ACTUV的構型想像圖,注意船體中部下方有一個大型的吊艙,裝置聲納。 在2012年11月,DARPA頒給Leidos公司(業務涵蓋國土安全等相關工程)一紙合約,負責設計、建造ACTUV原型載具,合約價值5900萬美元。Leidos設計的ACTUV載具是一種三體船舶(trimaran),船體由輕質、低雷達跡訊的碳纖複合材料建造,上面搭載所需的航行與任務籌載包括自主航行系統、導航雷達、光電感測器以及反潛探測所需的各種聲納等。最初ACTUV原型艇的建造工作頒給位於美國華盛頓州溫哥華(Vancouver)的克里斯汀森造船廠(Christensen Shipyards,主要業務是建造豪華遊艇),但該廠旋即面臨破產並遭到託管,因此合約就轉至位於俄勒岡州(Oregon)波特蘭市(Portland)的維格工業(Vigor Industrial)的船塢。 為了確保ACTUV的自主航行能力可以符合國際海上避碰規範(COLREGS),Leidos進行了先期試驗,使用一艘長32英尺(9.8m)的水面船隻來模擬ACTUV,由無人航行控制軟體控制;在海上實驗中,載具需正確地探測周遭水面船隻,並依照COLREGS規範進行航行操作,與周遭船隻正確進行互動。這項測試包含在狹窄水域中航行,沒有任何預設前提(例如已知其他船舶的預定航路)的情況下,正確探測並迴避水面船隻。在2014年11月,Leidos宣布用來測試的載具完成了42天的海上持續航行展示,證實能符合COLREGS規範。接下來自主航行系統還要接受更複雜、更接近真實狀況的測試,包括多動向多重船隻接近,以及其他船隻在更複雜的行為之下的互動。 在2015年1月26日,Leidos宣布,ACTUV的自主航行軟體成功在密西西比(Mississippi)附近海岸進行了航行測試,包括感測器測試、機動操作以及任務功能。在這一次測試中,Leidos使用一艘長42英尺(12m)的工作艇來模擬ACTUV,搭載自主航行控制系統;測試期間,此一載具在密西西比的灣區國際水道(Gulf Intracoastal Waterway)操作,預先輸入航行系統的資料只有周遭水道的電子海圖,航行系統只依靠一個一般商規的導航雷達來探測周遭水面情況。在測試中,測試載具航行了35海里(65km),一路上成功迴避了所有障礙物、浮標、沿岸地形、淺灘以及路上遇到的各種船隻,過程中完全沒有使用到其他備用措施如預先輸入的航行轉折點,或者其任何形式的人工干預。
正吊放入水中的海獵人號,可以觀察到採用雙軸推進。
試航中的海獵人號。 第一艘正式的ACTUV原型艇在2015年於維格船塢開工建造,命名為海獵人號(Sea Hunter)。海獵人採用三船體設計,長132英尺(40.23m),全寬(含兩側浮力船體)12.19m(另一說是15.24m),中央船體寬3.35m,排水量約140噸,採用兩部柴油主機推進(雙軸),最大水面航速27節(在平靜水面下),能在五級以內海象持續操作,在7級海象內能保證航行與存活。預估ACTUV服役後美日操作花費約1.5萬至2萬美元,遠低於一般的驅逐艦(每日70萬美元)。為了符合COLREGS規範,海獵人號配備導航雷達(使用一般商規產品)以及自動識別系統(Automatic Identification System,AIS),用於平時的航行操作。 在2015年10月,海獵人號的建造工作完成90%,系統硬體都製造完成,並開始與軟體進行整合工作。在2015年11月,雷松(Raytheon)公司交付第一套模組化、可擴充/裁減聲納系統(Modular Scalable Sonar System,MS3)至Leidos的廠區,這是海獵人號的任務籌載。MS3是第五代的船用聲納系統,結合主/被動模式下的搜索、追蹤、魚雷接近警告、小型物體探測迴避等功能。
在2016年1月17日,海獵人號在廠房中下水,在4月7日舉行了命名洗禮儀式。隨後的初期測試中,海獵人號成功捕捉到距離1公里外的潛艦。此後,DARPA會將海獵人號移交給DARPA下轄的海軍研究辦公室(Office
of Naval Research,ORN)送至聖地牙哥(San Diego)的洛馬角(Point Loma)進行各項測試,為期兩年,在2018年9月完成。海獵人號美日平均操作成本約為1.5萬至2萬美元,遠低於驅逐艦(每日70萬美元);海獵人的測試項目也包括與LCS濱海戰鬥船艦一起運作,作為LCS的反潛作戰模組之一。在2016年6月22日,海獵人完成初期測試,達到或超過所有的預設性能指標,包括在開闊海面上的速度、操作靈活性、耐海能力、穩定性、加速/減速、燃油消耗、機械可靠度等等。之後海獵人號的測試項目包括驗證自動航行操作套件依照海上避碰規則(maritime
collision regulations)之下的操作,並且針對美國海軍的各種作戰任務進行概念展示操作。
(上與下)在2016年10月下旬DARPA的測試中,以海獵人號無人載具測試部署在滑翔傘上的 TALONS原型。TALONS將水面雷達、光電感測器等監視設施部署在1000英尺左右的高度, 能以低廉的成本讓水面船艦的偵察監視距離大幅增加。
在2016年10月27日,DARPA表示,研究中的海軍拖曳式空中舉升系統(Towed Airborne Lift of Naval Systems ,TALONS)會是水面反潛無人載具的第一項任務籌載。TALONS結合搜索雷達、光電偵蒐與無線電探測等情報蒐集、監視、偵察(Intelligence, Surveillance and Reconnaissance,ISR裝備),透過滑翔傘在水面載具後方拖曳升空,部署高度約150至1500英尺(45.72m~457.2m),以低廉的成本讓水面船艦的探測監視距離倍增。DARPA表示,在這一週的測試中,TALONS的原型由海獵人號水面載具拖曳施放,部署在約1000英尺(204.8m)的高度;為期2天的測試中,TALONS每天從無人載具施放升空約90分鐘,施放期間海獵人號仍能保持正常的航行速率。透過將感測器升高,TALONS能大幅增加探測的距離(由於無人水面載具的桅杆高度不足,直接在桅杆上部署系統的工作範圍勢必受到限制)。DARPA表示,就TALONS的部署高度(約1000英尺)相較於水面,追蹤雷達工作距離可以增加六倍,光電/紅外線感測器的有效識別距離增加一倍(達1000英尺),商用無線電設備工作距離可增加三倍。 在2017年1月10日水面船艦協會(Surface Nav Association)年度學術研討會上,美國海軍無人海上系統(Unmanned Maritime Systems)的專案總Jon Rucker上校透露,美國海軍正打算進一步擴充ACTUV的功能,使其能進行水面作戰,包括發動電子攻擊以及使用攻擊性武器等,此外也會裝置水面上的電子情報監視與偵察(ISR)相關任務籌載(如前述TALONS);而如果要在ACTUV上部署攻擊性武器,就必須透過人工操作來識別目標並進行開火(一如武裝型UAV的作業準則)。 在2017年9月14日,美國海軍在倫敦國際防務與安全裝備展(Defence and Security Equipment International ,DSEI)宣布,正準備從美國國防先進研究計畫局(Defense Advanced Research Projects Agency,DARPA)手中接收連續追蹤反潛無人載具(ASW Continuous Trail Unmanned Vessel,ACTUV)項目,由美國海軍研究辦公室(Office of Naval Research,ONR)負責,準備展開一個為期兩年的測試計畫,準備建造第二艘與海獵人號類似的ACTUV,並可能建造第三艘。在2017年12月,Leido公司獲得ORN一紙價值3550萬美元的固定價款合約,建造基於海獵人號的第二艘三體水面自航載具,排水量145噸。 經過一連串成功的初步測試評估之後,海獵人號在2018年2月1日正式從DARPA移交給ONR。在2019年2月,美國海軍宣布,海獵人號成功地從美國西岸聖地牙哥自動航行到夏威夷並返航;依照日後資料,海獵人號在這次航行期間曾經過少量的人力機械檢修維護,但整個航行過程完全沒有人員操控的介入。 由海軍接手:中型無人水面載具(MUSV) 在2017年9月14日,美國海軍在倫敦國際防務與安全裝備展(Defence and Security Equipment International ,DSEI)宣布,正準備從美國國防先進研究計畫局(Defense Advanced Research Projects Agency,DARPA)手中接收連續追蹤反潛無人載具(ASW Continuous Trail Unmanned Vessel,ACTUV)項目,由美國海軍研究辦公室(Office of Naval Research,ONR)負責,準備展開一個為期兩年的測試計畫。ONR將繼續建造第二艘與海獵人號類似的ACTUV,並可能建造第三艘。 美國海軍接手ACTUV計畫之後,除了持續發展原本的反潛能力之外,將更著重於發展ACTUV的多任務能力,結合各種不同的任務籌載,執行情報監視、水文測量乃至於水面作戰等,成為一種用途廣泛的「無人籌載卡車」(autonomous truck)。美國海軍也將發展ACTUV的自衛能力(包括加裝武器系統),在長期航行作業期間不會太輕易就被敵方俘虜或消滅。移交ONR後,海獵人展開一系列作戰相關測試,並且評估加裝光電/紅外線(EO/IR)、水雷反制與反潛作戰能力等;而在2018財年的計畫包括在海獵人上加裝情報監視偵察(Intelligence, Surveillance and Reconnaissance,ISR)以及攻勢性反潛作戰籌載等。經過一連串成功的初步測試評估之後,海獵人號在2018年2月1日正式從DARPA移交給ONR,隨後美國海軍繼續發展規模類似海獵人號的中型無人水面載具(Medium Unmanned Surface Vehicle,MUSV)。 在2019年2月,美國海軍宣布,海獵人號成功地從美國西岸自動航行到夏威夷並返航。 在2019年5月22日, 美國海軍將操作三艘同型艦的松華特(Zumwalt class)驅逐艦第一中隊( Zumwalt Squadron 1,ZRON-1 )改名為第一水面開發群( Surface Development Squadron 1, SURFDEVRON 1)。SURFDEVRON 1以實驗新技術與新能力為主要任務,不僅進行松華特級驅逐艦的能力轉型(由最初的陸攻轉向大洋制海),還包括實驗讓無人水面載具與一般艦隊。SURFDEVRON納入美國海軍第一艘中型無人水面載具海獵人號,以及2020財年完成建造的第二艘海獵人號(Sea Hunter 2)載具;之後海軍大型無人水面載具(LDUSV或LUSV)項目也會整合進SURFDEVORON 1。 在2020年1月中旬,SURFDEVRON-1指揮官Hank Adams透露,SURFDEVRON-1接收海獵人-1號載具之後數個月,已經擬定了測試需求以及計畫,並開始讓艦隊人員熟悉如何操作;而在2020財年,海獵人-1號會進行更進一步的海上測試,包括訓練艦隊人員如何操作,並完全與航母打擊群一同作業(由打擊群在海上控制)。 到2020年底,海獵人號已經參與兩次美國水面作戰進階戰術訓練(Surface Warfare Advanced Tactical Training,SWATT)。在2020年9月30日,在一個美國海軍線上集會中,主管小型水面船艦與無人水面船艦的海軍少將Casey Moton透露,美國海軍會在2021財年在艦隊各項演習活動中正式納入無人載具,包括編制在SURFDEVRON-1的海獵人號、兩艘國防部戰略能力辦公室(Defense Department Strategic Capabilities Office)的大君主(Overlord)無人水面載具等。相關演習操作包括由有人船艦直接指揮控制多艘USV,測試相關的指揮管制系統,讓USV與水面作戰群一同作業,並訓練艦隊人員適應與無人載具一同作業等。此時,美國海軍正在水面船艦C4I系統中整合控制LUSV及MUSV無人水面載具的能力,包含神盾系統;不過,開火需由指揮控制迴路中的人員來決定。Casey Moton表示,在2021財年時,美國海軍會增加USV載具在海上渡航的時間達30天,此外」會測試各項由政府供應(government-furnished)的C4I籌載、作戰系統籌載、船體/機械/電子的聲級改進,以及一些更複雜的自主作業,並會展示機電控制系統,以及從遠端監控中心掌握USV系統健康狀況(確保USV持續工作的可靠性)。 在2021年4月7日,Leidos公司宣布,海獵人USV的二號艦完成測試交付美國海軍,命名為海鷹號(Sea Hawk)。Leidos公司在聲明中指出,依照首艦海獵人號的測試經驗,海鷹號總共有超過300項改進,涵蓋機電、籌載安裝系統、控制站等等。Leidos公司海事方案(Maritime Solutions)副總裁Dan Brintzinghoffer表示,海鷹號並不是僅僅在現有船型上安裝無人自航系統而已,艇上所有機械、電子系統都擁有獨特規格,使其能在海上自主運作數個月而不需要人員進行維護。海鷹號的推進系統包括兩部柴油主機,艇上攜帶14000加侖燃油。 第一次有人/無人水面船艦聯合演習:無人整合戰鬥課題21(UxS IBP 21) 在2021年4月19到26日,美國海軍進行有史以來第一次、結合有人船艦、無人船艦以及有人、無人航空機的聯合演習,稱為無人整合戰鬥課題21(Unmanned Integrated Battle Problem 21,UxS IBP 21)。這項演習主要是評估有人船艦與無人載具在三個領域進行聯合作業,包括:情報/監視/偵察(Intelligence, Surveillance and Reconnaissance)、標定目標以及飛彈射擊,以及驗證各有人/無人平台與系統之間的聯合作業。演習項目包括實彈射擊,有人船艦以及無人載具用各自的感測器蒐集目標資訊,透過資料鏈實時分享並融合數據,發現目標後制訂接戰方案,然後朝目標發射飛彈。
參與UxS IBP 21演習的松華特級驅逐艦麥可.蒙蘇爾號(DDG-1001)。艦尾直昇機甲板臨時增設 一組衛星通信天線,強化與各型空中、水面無人載具的傳輸能力。
參與UxS IBP 21演習的柏克級飛彈驅逐艦史普魯恩斯號(USS Spruance DDG-111),同樣在 艦尾直昇機甲板臨時增設一組衛星通信天線。
此次演習由美國太平洋艦隊司令部以及第三艦隊負責,參與這項演習的有人船艦包括松華特級驅逐艦麥可.蒙蘇爾號( USS Michael Monsoor,DDG-1001)、柏克級飛彈驅逐艦史普魯恩斯號(USS Spruance DDG-111)、約翰.芬恩號(USS John Finn DDG-113)、史特雷特號(USS Stockdale DDG-106)以及費茲傑拉德號(USS Fitzgerald DDG-62)。提康德羅加級飛彈巡洋艦普林斯頓號(USS Princeton CG-59)、自由級濱海戰鬥艦沃茲堡號(USS Fort Worth LCS-3)、獨立級濱海戰鬥艦科羅納多號(USS Coronado LCS-4)以及奧克蘭號(USS Oakland LCS 24)、聖安東尼奧級船塢運輸艦安克拉治號(USS Anchorage LPD-23)、洛杉磯級核能攻擊潛艦漢普頓號(USS Hampton SSN-767)。為了增強演習期間與各型空中、水面無人載具的資料傳輸能力,多艘參演艦艇在演習期間,於飛行甲板加裝額外的衛星通訊天線組。參與演習的載人航空機包括海軍P-8A普西頓海洋巡邏機、E-2C鷹眼空中預警機、EA-18G咆哮者(Growler)電子戰機、MH-60R反潛直昇機以及MH-60S直昇機等。 參與演習的無人水面載具包括兩艘中型無人水面載具(MDUSV),分別是海獵人號(Sea Hunter SH1)以及剛服役的同型載具海鷹號(Sea Hawk SH2),此外還有一艘國土安全局(Department of Homeland Security,DHS)科學與技術總監(Science and Technology Directorate,S&T)發展、由Ocean Aero 公司製造的Triton型水面/水下雙模式無人自航載具,以及美國海軍研究辦公室(Office of Naval Research,ONR)超級群蜂項目(Super Swarm Project)開發的群集載具。而參演的無人飛行載具包括MQ-8B火斥候(Fire Scout)垂直起降無人飛行載具、 MQ-9海衛(Sea Guardian)無人飛行載具、Vanilla超長距離無人飛行載具(Ultra Endurance UAV)等。 在演習中,麥可.蒙蘇爾號會作為各型無人水面、飛行載具的控制母艦,包括兩艘MDUSV水面載具、MQ-8B火斥候飛行載具、 MQ-9海衛UAV、Super Swarm群集載具等等。 2021年4月26日UxS IBP 21演習期間,約翰.芬恩號(USS John Finn DDG-113)飛彈驅逐艦透過其他參演的有人/無人水面與空中平台提供的信息,發射一枚SM-6防空飛彈,成功命中一艘距離該艦250海里外、水平線以下的水平線標靶。這次接戰測試中,所有平台都沒有使用會輻射信號的主動感測器;水面標靶裝備一個小型雷達反射器以及中繼器(repeater),放出電磁信號。參演的各有人/無人節點(包含無人機、有人及無人水面船艦)的被動電子截收裝置接收到了標靶的電磁信號,將相關信息傳輸給水平線以外的約翰.芬恩號;透過作戰網路傳來的融合信息,約翰.芬恩號在本身感測器沒有接觸的情況下發射SM-6,引導SM-6飛至目標所在區域,成功鎖定並命中目標。 這個射擊項目檢驗了由多個節點組成的被動多基感測器體系(passive multi-static sensor scheme),將多個節點對單一目標的探測資料融合成單一目標射控解算,引導飛彈完成超水平線反水面作戰。未來藉由無人機、無人水面載具等低跡訊平台探測到使用雷達的敵方水面船艦後,在自身不發射主動電磁信號(會讓目標警覺遭受攻擊而採取反制)的情況下,完成被動目標解算,為作戰網路中的火力節點提供指引,發射飛彈將目標摧毀。 美國海軍成立無人船艦作戰單位 在2021年9月8日,美國海軍作戰部長(Chief of Naval Operations,CNO)麥可.吉拉迪上將(Adm. Mike Gilday)在防務新聞(Defense News)透露,美國國防部領導的無人載具工作團隊(Unmanned Task Force)會依照3月制訂的框架,在美國海軍各艦隊陸續推動無人船艦,整個計畫框架與海軍的優勢計畫(Task Force Overmatch)跨領域整合類似。吉拉迪表示,目前無人船艦還沒有成熟到真正成為艦隊的一部份;美國海軍正在這條道路快速發展,或許在未來數年內無人船艦的發展終於水到渠成,五角大廈就會正式決定進入大規模生產並裝備艦隊。 在2021年9月9日,負責中東地區的美國海軍第五艦隊成立第59特遣群(Task Force 59),進行各領域無人載具(包含空中無人機以及水面無人船艦)的測試工作;這不僅是第一水面開發群(SURFDEVRON)之後,美國海軍成立的第二個無人船艦單位,更是第一個由美國海軍一線作戰艦隊成立的無人船艦實戰單位(第一水面開發群是專職測試單位)。第五艦隊預定在2022年1月與2月進行IMD 22大規模演習,驗證這些無人系統的聯合作戰能力。
第59特遣群以海上交通繁忙、威脅複雜的中東海域作為空中無人載具(UAV)以及水面無人載具的測試場域,如紅海、阿拉伯海、波斯灣等,希望使無人水面船艦的實用化往前邁進一大步。59特遣群的工作,會參照先前SURFDEVRON的經驗與模式。美國海軍發言人表示,TF59特遣群會保持美國海軍發展無人船艦的動能,繼續整合新科技並發揮創意,並融入先前美國測試無人船艦的經驗以及本身實際操作的經驗。
|
\